

نرم افزار کلین فلایت یکی از نرم افزار های قدرتمند و خوب برای تنظیم مولتی روتور ها به خصوص کلاس ریس یا سایز کوچک می باشد. Cleanflight با استفاده از یک رابط کاربری گرافیکی عالی به یک نرم افزار محبوب در تنظیم کردن مولتی روتور ها تبدیل شده است. در قسمت سوم با آموزش پیکربندی سیستم پیشرانش کوادکوپتر در کلین فلایت (CleanFlight) و تنظیمات آن در خدمت شما هستیم.
استفاده از نرم افزار کلین فلایت (Cleanflight)
نرم افزار Cleanflight یک نرم افزار پیکربندی برای انواع مولتی روتور ها می باشد که شما با اتصال مولتی روتور خود به کامپیوتر توسط یک سیم می توانید از این نرم افزار استفاده کرده و مولتی روتور خود را تنظیم کنید.
پیکربندی سیستم پیشرانش کوادکوپتر در کلین فلایت
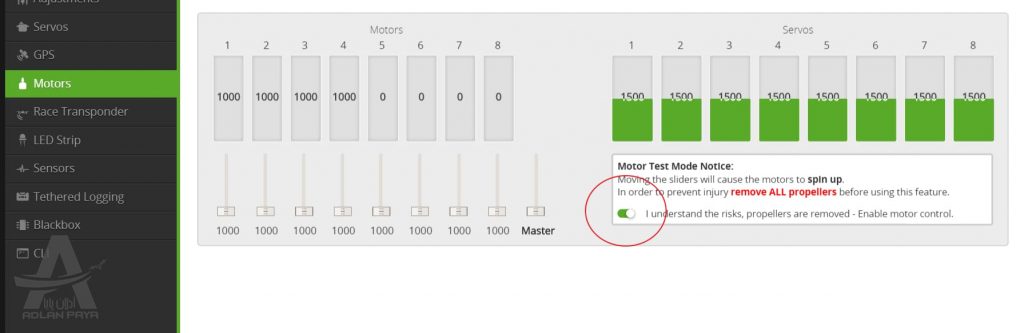
برای پیکربندی سیستم پیشرانش موتور لازم است که اول از همه قرار گیری درست و جهت چرخش موتور ها را بررسی کنید. برای این کار کافیست به تب Motors در کلین فلایت بروید. قبل از شروع تست کردن موتور ها از باز بودن ملخ ها اطمینان حاصل کنید.
سپس سرعت موتور ها را به ترتیب و یکی یکی تا 25 درصد بالا آورده و چهت چرخش و محل قرار گیری موتور ها را بررسی کنید. در صورت اشتباه بودن هر یک از این موارد باید آن ها را اصلاح کنید.
در صورت اشتباه بودن جای موتور ها کافیست محل اتصال سیم سیگنال اسپید کنترلر به فلایت کنترلر را جابجا کنید.
در این مقاله برای تغییر جهت چرخش موتور ها در نرم افزار BLHeli بحث خواهیم کرد. در صورتی که اسپید کنترلری با فریمر دیگر دارید باید نرم افزار مخصوص به آن را داشته و از آن طریق تنظیمات اسپید کنترلر خود را اصلاح کنید.
تغییر جهت چرخش موتور ها در نرم افزار BLHeli
اکنون می خواهیم نحوه تغییر جهت چرخش موتور ها در نرم افزار BLHeli را بررسی کنیم. توجه داشته باشید که فقط در صورت استفاده از اسپید کنترلر های BLHeli می توانید ار این نرم افزار استفاده کنید. در صورت نیاز به استفاده از مود damped light باید این روند را طی کنید ؛ حتی اگر تمامی موتور ها در جهت صحیح بچرخند. در ادامه در مورد مود damped light توضیح خواهیم داد.
اولین گام قطع کردن فلایت کنترلر از نرم افزار کلین فلایت (Cleanflight) می باشد. برای این کار کافیست بر روی دکمه Dissconnect در بالای صفحه نرم افزار کلین فلایت کلیک کنید.
از گذرگاه Celanflight به اسپید کنترلر خود متصل شوید
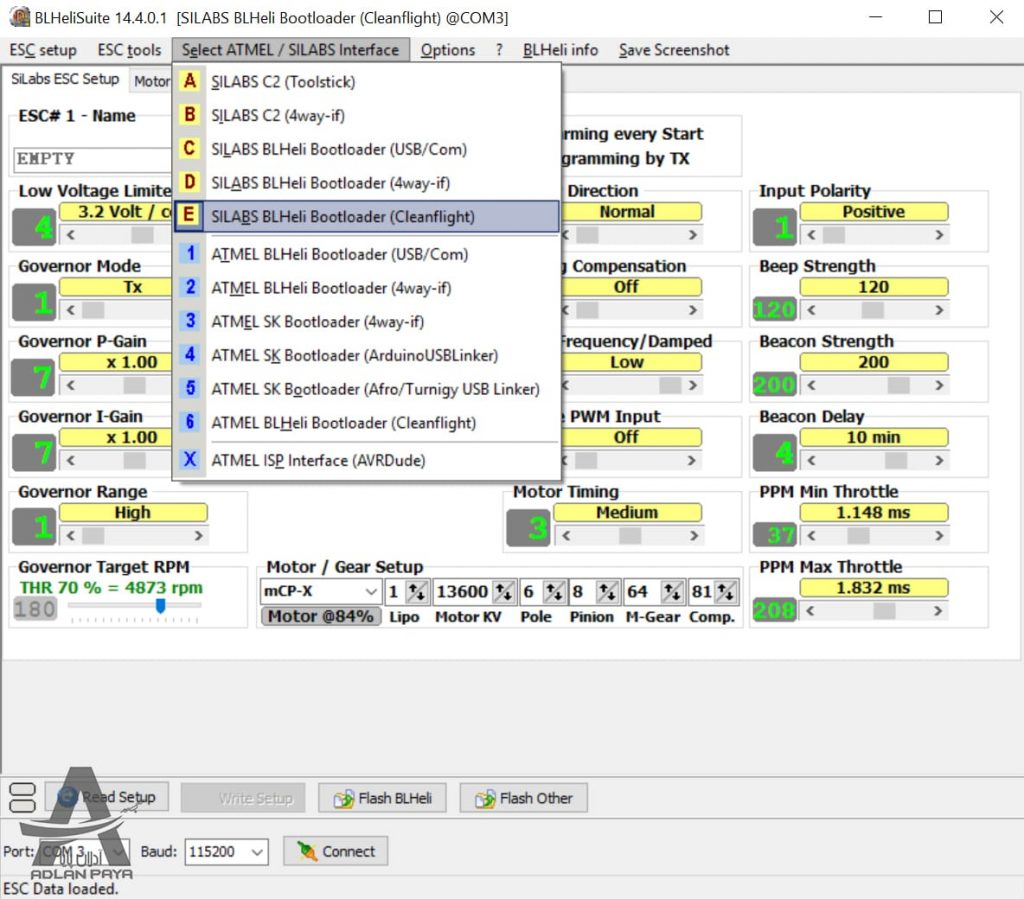
پس از باز کردن نرم افزار BLHeli بر روی “ATMEL/SILABS Interface” کلیک کرده و گزینه “(SILABS BLHeli Bootloader (Cleanflight” را انتخاب کنید. در صورت استفاده از تراشه ATMEL نیز می توانید گزینه “(ATMEL BLHeli Bootloader (Cleanflight” را انتخاب کنید.
در قسمت Port پورتی که فلایت کنترلر به آن متصل است را انتخاب کرده و بر روی دکمه Connect و سپس Check کلیک کنید. پس از این کار همه ی اسپید کنترلر ها باید شناخته شده و در پایین برنامه نشان داده شوند.
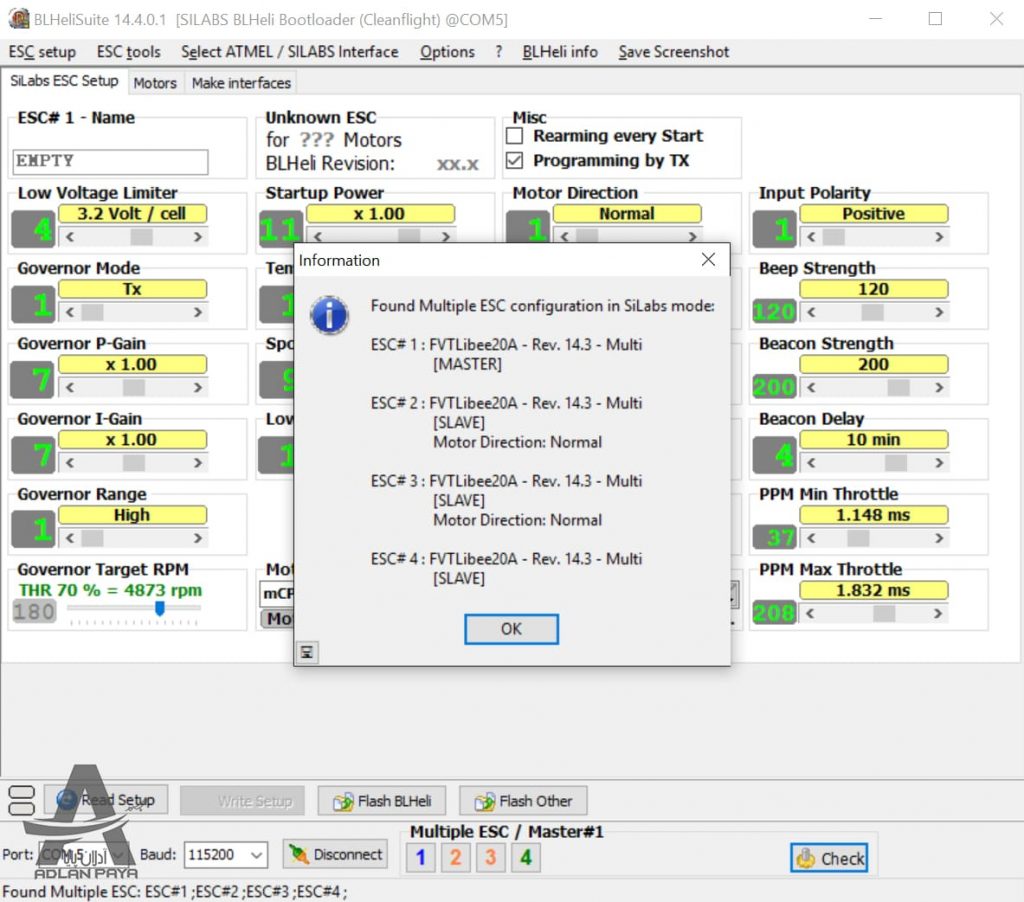
اگر پیام خطایی دریافت کردید اتصال را قطع کرده و دوباره متصل شوید. همچنین مد نظر داشته باشید که فریمور شما باید بروز باشد.
استفاده از مود damped light
در کوادکوپتر های کوچک و مسابقه ای استفاده از این مود بسیار مهم است. مود damped light به معنی ترمز در حرکت کوادکوپتر است! برای مثال هنگامی که موتور های کوادکوپتر شما در حال پرواز با حداکثر سرعت در حال چرخش باشند و شما ناگهان تراتل را بر روی 50 درصد بیاورید ، اسپید کنترلر ها در همان لحظه جهت چرخش موتور ها را بر عکس می کنند تا کوادکوپتر شما در حداقل زمان ممکن به سرعت مطلوب برسد. زیرا در حالت معمولی از زمانی که شما دستور تراتل 50 درصد را می دهید تا زمانی که پرنده به سرعت مطلوب شما برسد زمان زیادی طول می کشد و این در مسابقات مطلوب نیست.
یک مشکل که این سیستم دارد این است که به هنگام ترمز گرفتن با افت ولتاژ شدیدی از باتری مواجه می شوید. برای جبران این مشکل شما نیاز به استفاده از رگولاتور بین باتری و تمام اجزای الکترونیکی کوادکوپتر دارید. پس در غیر این صورت شما نباید از این مود استفاده کنید.
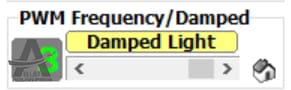
برای فعال کردن این بخش نیز کافیست در زیر قسمت “PWM Frequency/Damped” بر روی فلش سمت راست کلیک کرده تا گزینه “Damped Light” را مشاهده کنید. سپس بر روی “Write Setup” کلیک کنید تا تغییرات ذخیره شوند. پس از این عملیات باید تمام اسپید کنترلر ها صدا دهند.
تغییر جهت چرخش موتور
اکنون زمان آن است که هر موتور که در جهت اشتباه می چرخد را به صورت صحیح تنظیم کنید. برای انجام این کار کافیست شماره موتور هایی که در جهت اشتباه می چرخند را به یاد داشته باشید. سپس به ترتیب زیر این عملیات را انجام دهید.
- بر روی تمام اسپید کنترلر ها که در پایین نرم افزار نمایش داده می شوند کلیک کنید تا از برنامه حذف شده و مانند عکس زیر شوند.

- اسپید کنترلری که می خواهید جهت موتور متصل به آن را تغییر دهید را انتخاب کنید.

- سپس در قسمت “Motor Direction” حالت چرخش موتور را بر عکس کنید. یعنی اگر بر روی حالت Noraml بود تبدیل به Reversed کنید و بالعکس.
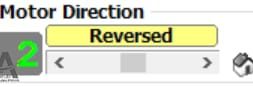
- بر روی ” Write Setup” کلیک کنید تا تغییرات ذخیره شوند.
بستن BLHeli و اتصال به Cleanflight
بر روی “Disconnect” کلیک کنید تا نرم افزار BLHeli بسته شود و سپس وارد نرم افزار پیکربندی کلین فلایت (Cleanflight) شوید.
پس از باز کردن نرم افزار بر روی دکمه Connect کلیک کنید.
چک کردن چرخش موتور ها
از نصب شدن صحیح موتور ها در روی بازو ها اطمینان حاصل کنید. سپس در نرم افزار سرعت چهار موتور را به صورت مساوی تا یک حد مشخص افزایش دهید. جهت چرخش موتور ها را دوباره بررسی کنید. اگر در سرعت چرخش موتور ها متوجه اختلافی شدید باید اسپید کنترلر های خود را کالیبره کنید. در صورت نیاز می توانید مقاله مربوط به آموزش چگونگی کالیبره کردن اسپید کنترلر ما مراجعه کنید.
تب Configuration
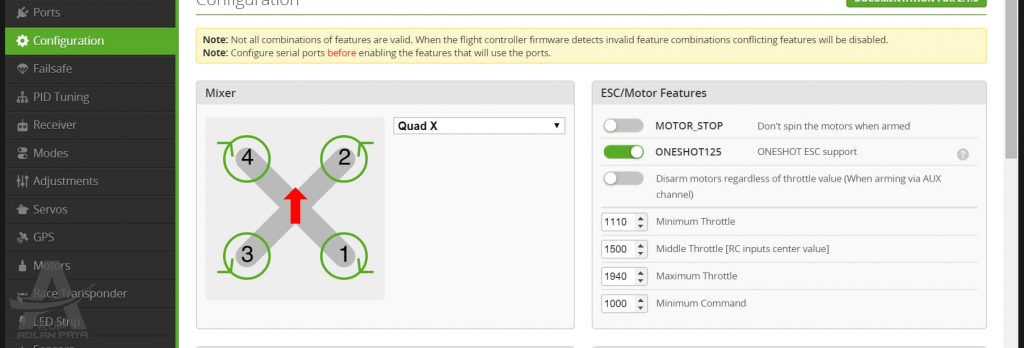
در این تب و در قسمت “ESC/Motor Features” نیز باید 4 مولفه را تنظیم کنید. این موارد شامل حداقل ، میانه ، حداکثر تراتل و حداقل دستور می باشد. حد میانه و حداکثر تراتل را باید به هنگام حرکت دادن استیک رادیو کنترلر و نمایش عدد در تب موتور ها در نرم افزار کلین فلایت (Cleanflight) یادداشت و در این قسمت وارد کنید. حداقل دستور همان کمترین مقدار موجود در تراتل می باشد. حداقل تراتل را نیز می توانید به صورت اختیاری تنظیم کنید اما بهتر است کمی بیشتر از حداقل دستور باشد.











