

در این آموزش قصد داریم توضیح دهیم که چگونه کوادکوپتر خود را با ورژن 3.4 فریمور بتافلایت و در ساده ترین حالت ممکن تنظیم می کنم.
راهنمای تنظیم کوادکوپتر با فریمور بتافلایت
برای تنظیمات بیشتر کوادکوپتر خود به سایت بتافلایت که ما لینک github تنظیم فریمور 3.4 را قرار داده ایم مراجعه کنید.
تنظیم FeedForward در بتافلایت
اگر شما از کوادکوپتر خود انتظار واکنش خوب و کنترل بیشتری دارید، باید مقدار F را افزایش دهید. ولی اگر شما یک توقف نرم بدون تکان اضافه را از پرنده ی خود می خواهید، باید ضریب D را افزایش دهید. همچنین اگر در محور yaw کوادکوپتر شما دچار نوسان می شود، مقادیر F و I را افزایش دهید و سپس مقدار P را برای واکنش بهتر کاهش دهید.
محدوده ی تغییرات این مقادیر در بتافلایت بین 0 تا 2000 است. ولی شما به هیچ وجه به مقدار 2000 آن نیاز نخواهید داشت.
دستور iterm_relax را فعال کنید
set iterm_relax = RPظاهرا افزایش بیش از حد ضرایب P و D می تواند منجر به آسیب زدن به کوادکوپتر شما شود، این نیز راجع به ضریب I صادق است! با فعال کردن “I-term relax”، می توان آن را در انتهای flips یا rolls کاهش داد.
“I-term relax” همچنین به شما اجازه می دهد تا ضریب I را تا 50٪ یا بیشتر افزایش دهید و باعث می شود پرواز کوادکوپتر شما اصطلاحا “locked in” (ثابت در یک نقطه) باشد.
Increase I gain by 50% from BF 3.3افزایش میزان تراتل (Throttle Boost)
با Throttle Boost زمانی که شما اهرم تراتل را بالا یا پایین می کند، بتافلایت سرعت موتور را تغییر می دهد. این دستور باعث می شود که کوادکوپتر های سایز بزرگ، کنترلشان همانند کوادکوتر های کوچک آسان تر و راحت تر شود.
Throttle Boost تغریبا شبیه منحنی تراتل است، که تغییرات تراتل را بررسی می کند و با اعمال می کند. این دستور فقط در زمان حرکت دادن سریع تراتل اجرا می شود و به هنگام تغییرات آهسته ی تراتل هیچ اثری روی حرکت نمی گذارد.
اگر از فیلتر RC smoothing استفاده می کنید، Throttle Boost می تواند تاخیر این فیلتر را جبران کند.
set throttle_boost = 10هنگام تنظیم این مقدار میزان تراتل خود را به سرعت کم و زیاد کنید، شما می خواهید به مقداری برسید که در آن تراتل دستور پذیری خوبی داشته باشد و پرنده ی شما به هنگام پرواز و فرمان گرفتن دچار overshoot و over-sensitive زیاد نباشد.
کوادکوپتر های سنگین و کوادکوپتر هایی با موتور هایی ضعیف، نیاز به افزایش مقدار Throttle Boost دارند.
اگر شما یک کوادکوپتر با تراتلی نرم می خواهید باید این مقدار را بین 3 تا 5 قرار دهید.
فیلتر RC Smoothing در بتافلایت
سیگنال های رادیو کنترل به طور لحظه ای و منظم بروز می شود. اگر به گزارشات بکل باکس نگاه کنید، شما stepping را در سیگنال های رادیو کنترل پیدا خواهید کرد. Stepping در سیگنال های رادیو کنترل باعث چرخیدن موتور ها می شود.
فیلتر RC Smoothing می تواند حرکات موتور ها را نرم تر کند. حتی می تواند حرکات سریع هر کدام از استیک ها را به حرکاتی آرام تر و نرم تر تبدیل کند.
روش دیگری به نام Interpolation وجود دارد، اما تاخیر این روش بسیار زیاد است. در فریمور بتافلایت 3.4، ما یک روش جدید به نام Filter ارائه می کنیم که دارای هماهنگی کمتری است، ولی در عوض میزان تاخیر کمی در سیستم ایجاد می کند. مزیت این فیلتر این است که کوادکوپتر شما واکنش پذیر تر است و مستقیما با استیک ها کنترل می شود.
set rc_smoothing_type = FILTER
set rc_interp = AUTO
set rc_interp_ch = RPYTاگر در زمان تغییرات سریع تراتل، شاهد واکنش خوبی را از این فیلتر نبودید؛ تنظیمات setpoint weight و throttle boost و ضریب P را برای جبران تنظیم کنید.
Adjust setpoint weight, throttle boost, P gainاگر که شما از پروتکل های SBUS یا FPORT استفاده می کنید، باید رادیو کنترل خود را به حالت D16 با استفاده از کانال 8 یا کمتر در صفحه تنظیمات رادیو کنترل ترنیس تنظیم کنید.
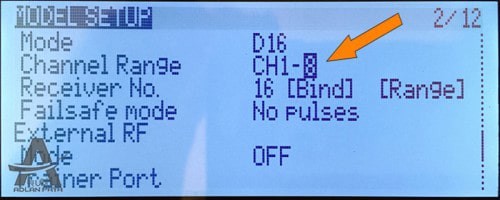
این فرایند به آپدیت سریع تر کانال های 9 تا 16 (9ms در برابر 18ms) وبرای رفع این مشکلات از فیلتر RC smoothing استفاده می کنیم.
تنها مشکل این است که شما تنها از 8 کانال می توانید استفاده کنید و این نباید مشکل برای سایر رقیبان و یا اوپراتور های دیگر ایجاد کند.
تنضیم ضرایب PID فلایت کنترل
شما می توانید ضرایب PID را از ورژن قبلی فریمور بتافلایت روی کوادکوپتر خود را کپی کنید ولی اگر شما می خواهید که ضرایب PID کوادکوپتر خود را دوباره از اول تنظیم کنید پیشنهاد می کنیم که مقاله ی تنظیم ضرایب PID فلایت کنترل در مولتی روتور ها را مطالعه کنید.
تغییرات فیلتر (Filter Changes)
همان طور که در پایین می بینید، 4 فیلتر low pass در هر دسته قرار دارد که از این 4 فیلتر 2 تای آنها برای Gyro و 2 تای دیگر برای ضریب D است. که همه ی این فیلتر ها به طور پیش فرض فعال هستند. همه آنها از PT1 استفاده می کنند و فیلتر های دوگانه ی جدید به نظر می رسد که به خوبی کار کنند، بنابراین اگر شما قصد تغییر دادن را دارید، فقط باید فرکانس فیلتر ها را توجه به تنظیم و شرایط مورد نیاز تغییر دهید.
هرچه این مقدار کمتر باشد، میزان تاخیر و فیلتر کردن زیاد است. فرکانس پایین برای زمانی است که پرنده ی شما دارای نوسان یا موتور ها زود داغ می کنند. شما می توانید این فیلتر را در تنظیمات خاموش کنید فقط کافی است که این مقدار را روی صفر تنظیم کنید، ولی به شما پیشنهاد می کنیم که این کار را انجام ندهید.
ساخت متوسط
set gyro_lowpass_hz = 120
set gyro_lowpass2_hz = 300
set dterm_lowpass_hz = 80-100
set dterm_lowpass2_hz = 160-250ساخت نرم
set gyro_lowpass_hz = 150
set gyro_lowpass2_hz = 400
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 250کوادکوپتر دارای نویز و جهش
set gyro_lowpass_hz = 90
set gyro_lowpass2_hz = 180
set dterm_lowpass_hz = 70
set dterm_lowpass2_hz = 140فعال کردن فیلتر Dynamic
بهتر است که همیشه این فیلتر فعال باشد. با اینکه در سیستم تاخیر ایجاد می کند اما با شناسایی و حذف فرکانس های ایجاد کننده ی نویز، به سیستم شما نیز کمک می کند و همیشه سعی در روشن نگه داشتن این فیلتر داشته باشید.











