

در این سر فصل قصد داریم تا نحوه نصب فریمور Betaflight را در Betaflight configurator برای اولین بار به شما عزیزان آموزش دهیم. Betaflight یکی از بهترین فریمور های فلایت کنترل موجود می باشد.این فریمور که یک نسخه متن باز (open source) را در اختیار کاربر قرار می دهد گزینه بسیار مناسبی برای کواد کوپتر ها و مولتی روتو های سایز کوچک می باشد.
قبل از انجام هرکاری شما نیاز دارید تا نسخه Betaflight configurator را دانلود کنید و فلایت کنترل خود را برای شروع نصب از طریق کابل USB به سیستم خود متصل کنید.
در ادامه با شما همراه خواهیم بود با آموزش گام به گام فریمور Betaflight و توضیح در مورد تنظیمات ابتدایی و هرآنچه که برای یک پرواز موفق نیاز دارید .
شروع آموزش در Betaflight configurator
برای راحت تر شدن و سده تر شدن آموزش پیشنهاد میکنیم برای شروع از این قطعات و سخت افزار های رایج استفاده کنید
- Frsky RX, SBUS and SmartPort telemetry
- F3 or F4 flight controllers running Betaflight 3.2 or newer firmware
- ESC’s capable of DShot ESC protocol
آپدیت فریمور
امروزه اکثر فلایت کنترل ها با فریمور از پیش نصب شده Betaflight توسط کارخانه سازنده عرضه می شوند و نیازی به فلش کردن ندارند.اما اگر شما میخواهید که از آخرین آپدیت ها بر روی فلایت کنترل خود استفاده کنید می توانید آن را ابتدا فلش کنید.
شروع نصب فریمور Betaflight برای اولین بار
ابتدا برای حفظ ایمنی ملخ ها را از روی موتور ها باز کرده و تا زمان پرواز از نصب آن ها بر روی کوادکوپتر خودداری کنید.
توضیحات بیان شده زیر صرفا جهت رفع نیاز اولیه و آشنایی اولیه با فریمور Betaflight است.بعد از یادگیری کامل این تنظیمات میتوانید وارد مرحله جدید جهت شخصی سازی سایر تنظیمات کوادکوپتر و مولتی روتور خود شوید.
اتصال کوادکوپتر به سیستم
برای اتصال فلایت کنترل خود از پورت USB استفاده کنید.اتصال این کابل برای برق رسانی به فلایت کنترل کافی است و نیازی به اتصال باتری ها نیست.پس از اتصال کابل، بر روی Betafgilght configurator پورت جدیدی جهت اتصال نمایان خواهد شد که درواقع پورت فلایت کنترل شما است.این پورت ممکن است برای هر فلایت کنترلی متفاوت باشد.اگر در پیدا کردن پورت یا متصل شدن به فلایت کنترل از طریق نرم افزار دچار مشکل شدید می بایست تنظیمات درایور خود را چک کنید. و یا ممکن است این مشکل به دلیل از کار افتادن یا به اصطلاح bricked شدن فلایت کنترل باشد که می توانید در مقاله مرتبط با این موضوع.این مشکل را حل کنید.
تب نصب فریمور(SETUP) در فریمور Betaflight
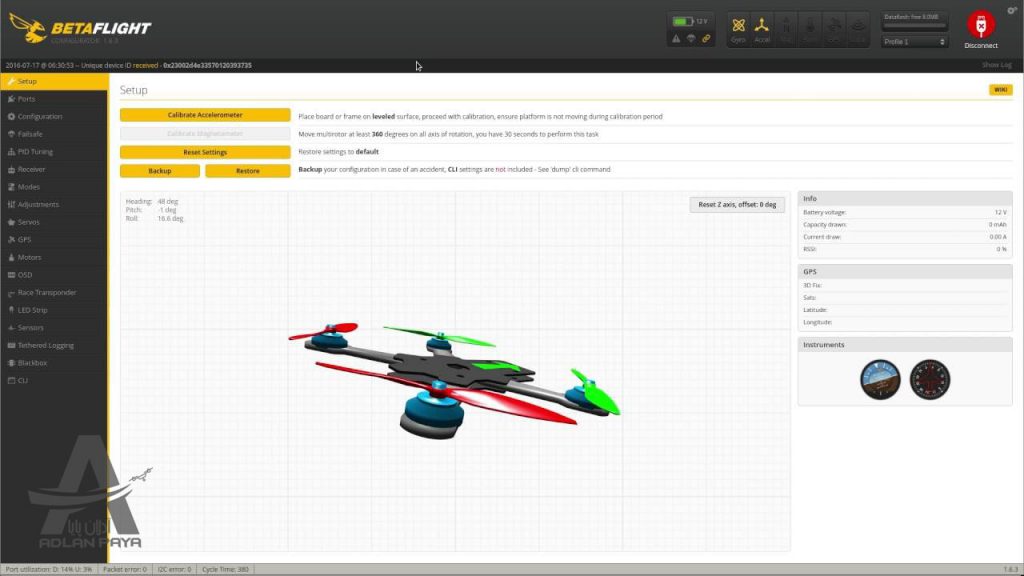
بعد از اتصال درست و کامل فلایت کنترل به Beteflight configurator میتوانید تب نصب(setup) را بر روی نرم افزار ببینید.در این قسمت شما به تمامی اطلاعات مورد نیاز کوادکوپتر و بسیاری از تنظیمات دسترسی پیدا خواهید کرد.
برای شروع مراحل زیر را به ترتیب انجام خواهیم داد.
- ابتدا قبل از انجام هرگونه تغییرات از نسخه فعلی تنظیمات خود پشتیبان گیری کنید (بکاپ تهیه کنید) تا در صورت بروز هرگونه مشکل بتوانید تنظیمات اولیه خود را بازگردانی کنید.
- مولتی روتور و کوادکوپتر خود را بر روی یک سطح صاف برای کالیبره کردن قرار دهید و سپس گزینه Calibrate Accelerometer را انتخاب کنید.
- کوادکوپتر خود را بر روی دست نگه داشته و شروع به زاویه دادن به آن کنید.در این شرایط مدل سه بعدی کوادکوپتر بر روی Betafglight configurator نیز باید شروع به حرکت در جهت و اندازه درست بکند.
در صورتی که مدل سه بعدی در جهت درست نسبت به حرکت کواد شما بر روی دست عمل نمیکند به این دلیل است که شما فلایت کنترل را جهت درست نصب نکرده اید(یعنی فلش موجود بر فلایت کنترل با قسمت جلویی مولتی روتور همو سو نیست).برای تصحیح این خطا یا باید فلایت کنترل را باز کرده در جهت درست نصب کنید و یا میتوانید در تب configurator و در قسمت board sensor alignment تنظیمات yaw offset را برای تحصیحی خطا تغیر دهید.این تنظیمات معمولا باید بر روی مقادیر 90و180و 270 درجه باشند.
درگاه های(port) موجود در فلایت کنترل
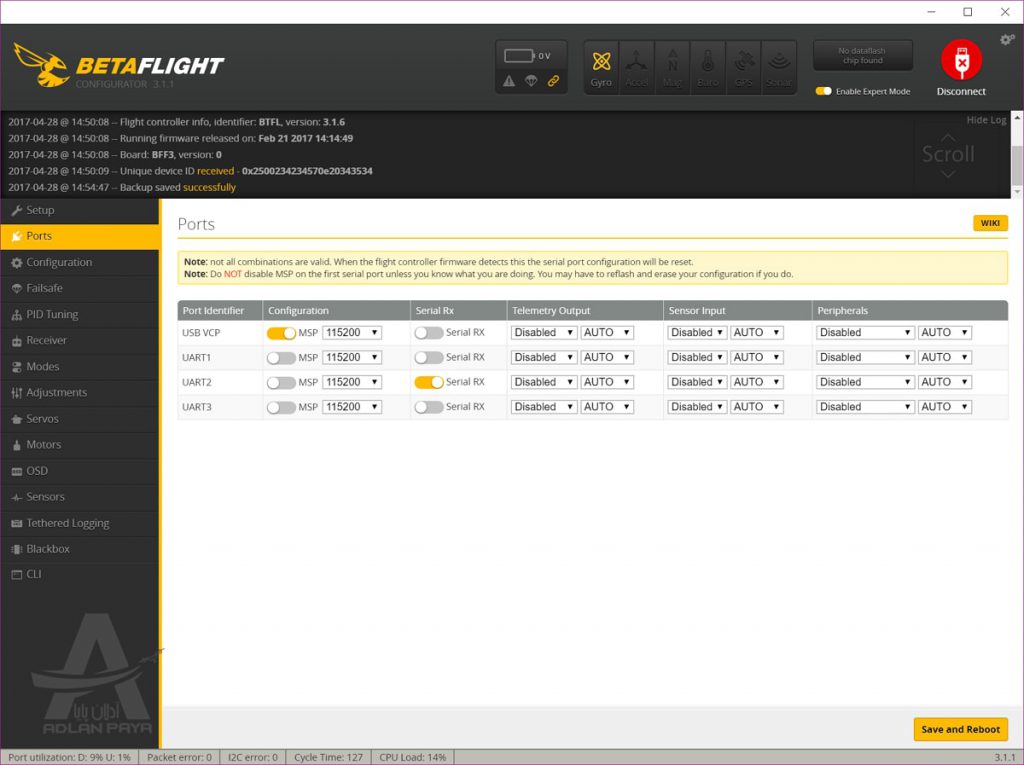
در تب پورت ها شما میتوانید به تنظیمات تمامی دستگاه ها و سخت افزار های خارجی که از طریق پورت های UART به مولتی روتور متصل می شوند دسترسی داشته باشید.
- اگر شما برای رسیور خود از پروتکل SBUS و یا IBUS استفاده میکنید باید برای پورتی که رسیور خود را به آن متصل کرده اید گزینه SERIAL RX را فعال کنید.
- و درصورتی که برای یکی از سخت افزار های خارجی خود از SMART PORT استفاده میکنید در قسمت Telemetry Output و در گزینه کشویی گزینه SMARTPORT VH انتخاب کنید.
پیکربندی فلایت کنترل
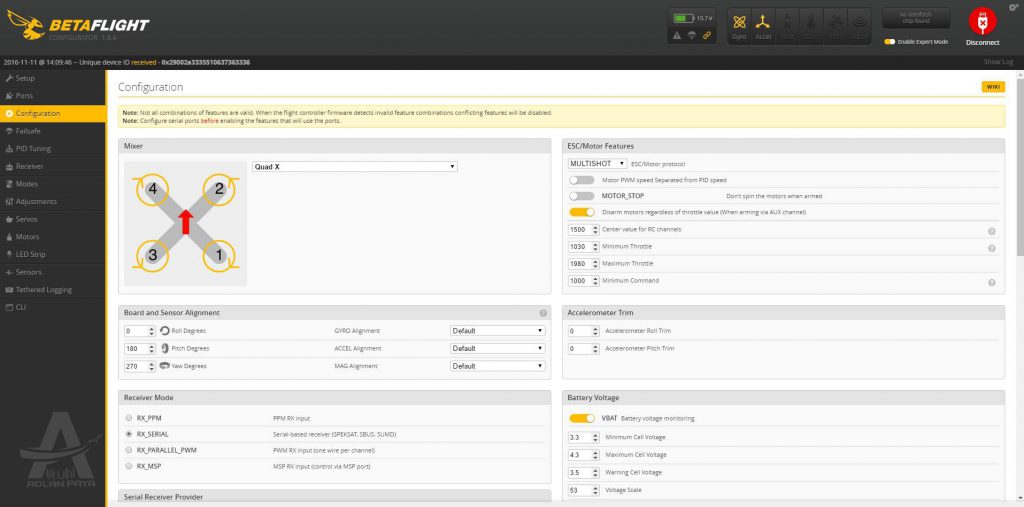
در تب پیکربندی و یا به اصطلاح CONFIGURATION شما تمامی تنظیمات مورد نیاز مربوط به نحوه پرواز و عملکرد مولتی روتور و کواد کوپتر خود را مشاهده خواهید کرد.
- در قسمت ESC/MOTOR Featurse شما تمامی پروتکل هایی که اسپید کنترل(ESC) شما توانایی پشتیبانی دارد را میتوانید مشاهده کنید.پیشنهاد میکنیم تا در این قسمت برای ارتباط بین فلایت کنترل و اسپید کنترل از پروتکل dshot استفاده کنید.اما توجه داشته باشید که تمامی اسپید کنترل ها توانایی پشتیبانی از انواع پروتکل های DSHOT را ندارند پس ابتدا درباره نوع اسپید کنترل خود اطلاعال لازم را کسب کنید.
- در قسمت SYSTEM CONFIGURATION به دو مقدار خیلی مهم بر میخوریم.
- دوره زمانی یا loop Frequency PID که این مقدار به نوع ظرفیت و توانایی تحلیل فلایت کنترل شما بستگی دارد.اما پیشنهاد میشود برای کواد کوپتر های با ساختار ضعیف از مقدار 2KHz و برای کوادکوپتر هایی با سازه های محکم از مقدار 4khZ استفاده شود.
- نرخ تغییرات سنسور جایرو یا Gyro Sampling Rate که معمولا مساوری با مقدار looptime قرار میگیرد اما برخی بر این عقیده اند که باید این مقدار دو برابر looptime باشد.
- برای اطمینان از مقدایر گفته شده بهتر است تا هردو مقدار هنگام پرواز چک شود تا بهترین تنظیمات برای خود را انتخاب کنید.
- درهنگام تغیی مقادیر و تنظیمات بر روی فلایت کنترل در Betaflight configurator در قسمت پایین صفحه به عدد cpu load توجه کنید تا این عدد همواره کمتر از 30 درصد باشد چرا که مقدار بالاتر از این عدد باعث ناپایدای فلایت کنترل خواهد شد.
- شما میتوانید گزینه Accelerometer را غیر فعال نگه دارید تا قدریت پردازش بیشتری داشته باشید ولی به یاد داشته باشید که با غیر فعال کردن این گزینه دیگر امکان استفاده از مود های angle و horizon را نخواهید داشت و همچنین توانایی دیدن حرکت مدل سه بعدی در تب setup را نخواهید داشت.
- همیشه گزینه های Barometer و Magnetometerرا در هنگامی که از مود اکرو استفاده میکنید غیر فعال نگه دارید.
- در قسمت personalization شما نامی را انتخاب خواهید کرد که بر روی Betaflight OSD نمایش داده خواهد شد.
- و در قسمت RECIEVER نیز اگر از پروتکل های SBUS و IBUS استفاده میکنید گزینه Serial-based receiver را در قسمت RECIEVER MODE انتخواب کرده اگر از PPM استفاده میکنید گزینه PPM RX INPUT را انتخاب کنید . و در قسمت Serial Receiver Provider نیز اگر از FRSKY RX استفاده میکنید گزینه SBUS را انتخاب کنید.
- در قسمت OTHER FEATURSE نیز خواهیم داشت:
در این قسمت نیز اگر شما تنظیمات موجود را بر وری پیش فرض و به صورت دست نخورده باقی بگذارید مشکلی پیش نخواهد آمد اما اگر تمایل به تغییر تنظیمات دارید میتوانید گزینه های
- Anti-Gravity
- Dynamic Filter
- Telemetry (for SmartPort)
- OSD (اگر این گزینه بر روی فلایت شما نصب شده است)
را فعال کنید تا پرواز بهتری را تجربه کنید.و در آخر نیز تمام تنظیمات را ذخیره کنید.
تب RECIEVER در فریمور Betaflight
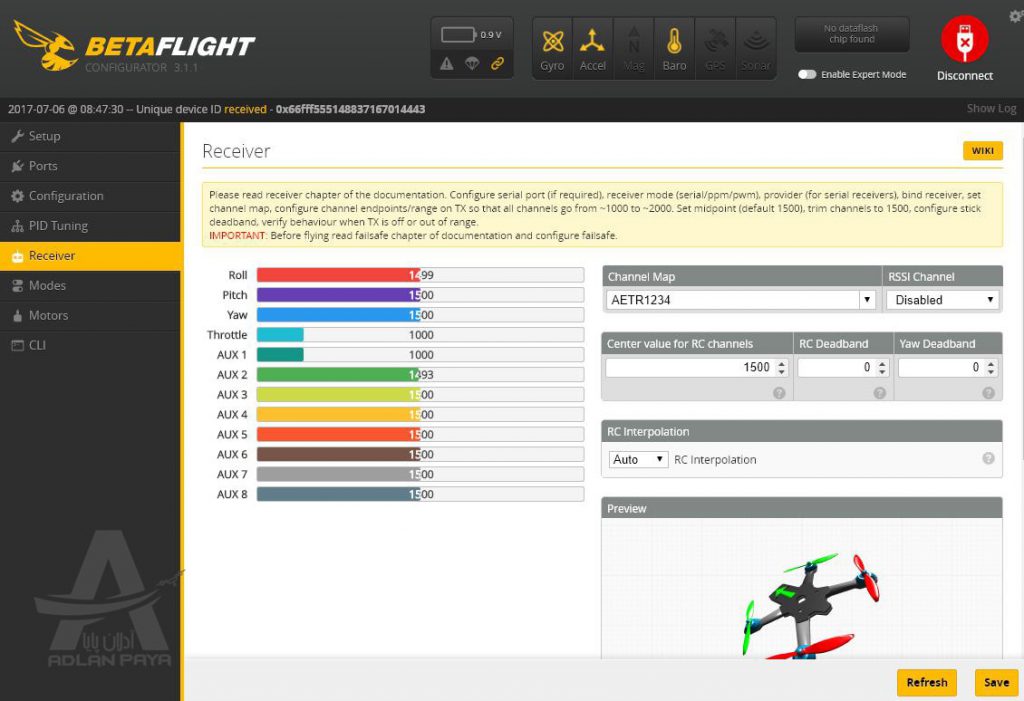
تب RECIEVER در Betaflight configurator برای برسی وضیت فرستنده ها و گیرنده شما اضافه شده تا شما بتوانید با افزایش و کاهش throttle و نحوه عکس العمل فرستنده و گیرنده میزان خطا و تاخیر ارسال سیگنال ها را چک کنید و در صورت اشتباه بودن کاال ها آن ها را دوباره تنظیم کنید.
اگر با مشکی جواب ندادن هیچکدام از کانال ها رو برو شدید ممکن است:
- رسیور و فرستنده شما با یکدیگر جفت نشده باشند.
- رسیور به خوبی به فلایت کنترل متصل نشده باشد.
- پورت سریال رسیور در پورت UART درستی متصل نشده باشد.
- پروتکل ارتباطی رسیور به درستی انتخاب نشده باشد.
بعد از چک کردن درستی عملکرد کامال ها نقطه های میانی و پایانی 4 کانال PITCH , YAW , ROLL و TROTTLE را چک کنید که به ترتیب بر روی مقادیر 1500 و 2000 باشند.
تب MODES فریمور Betaflight
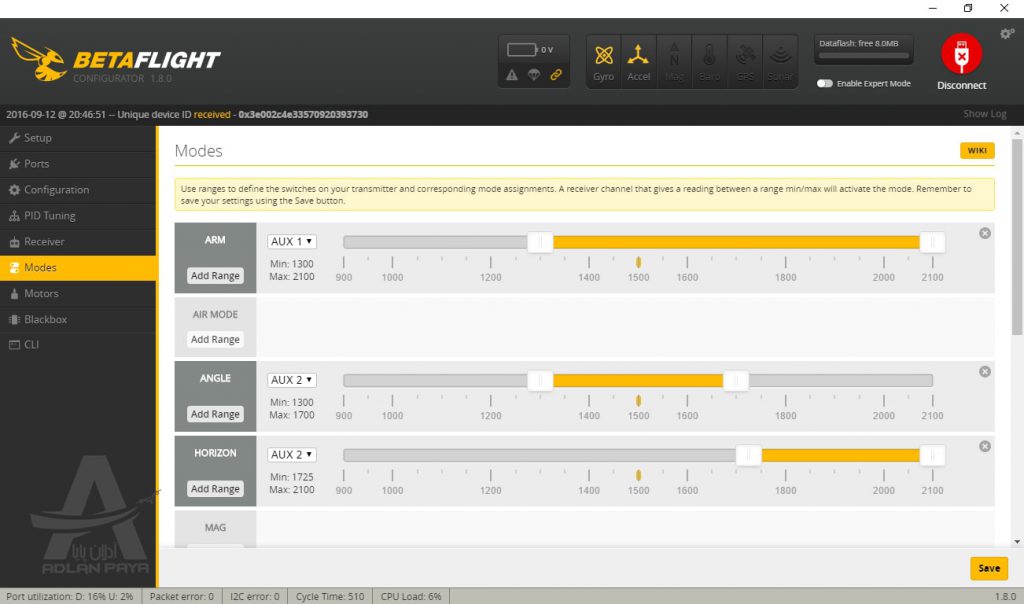
در این قسمت از Betaflight configurator میتوانید نحوه فعال شدن مود های مختلف را بر روی فرستنده و رادیو خود تنظیم کنید.مود هایی از قبیل ARMING , AIRMODE , ANGLE MODE و BEEPER MODE .
تب MOTOR فریمور Betaflight
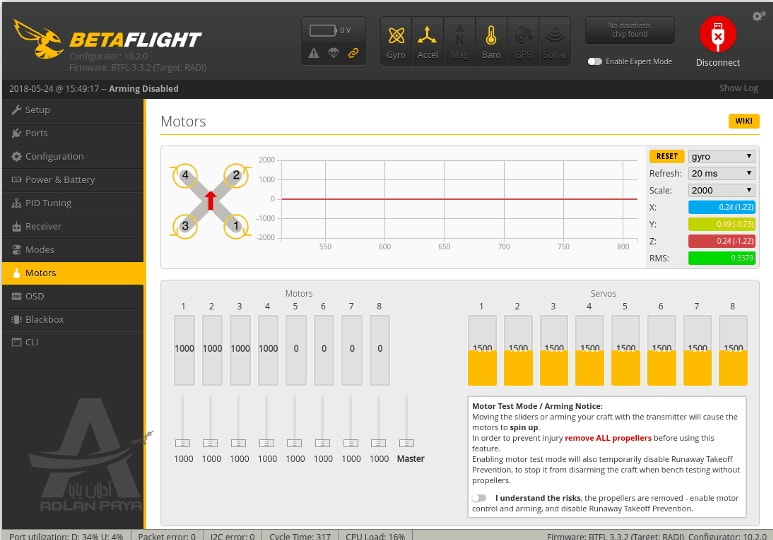
یکی از کار هایی که باید در این قسمت از Betaflight configurator انجام دهید نحوه چرخش موتور های کوادکوپتر است ک باید به صورت زیر باشد.
در صورت اشتباه بودن جهت چرخش میتوانید آن را در BLHELI SUITE دوباره تنظیم کنید.
تب تنظیم ضرایب PID یا به اصطلاح PID TUNING
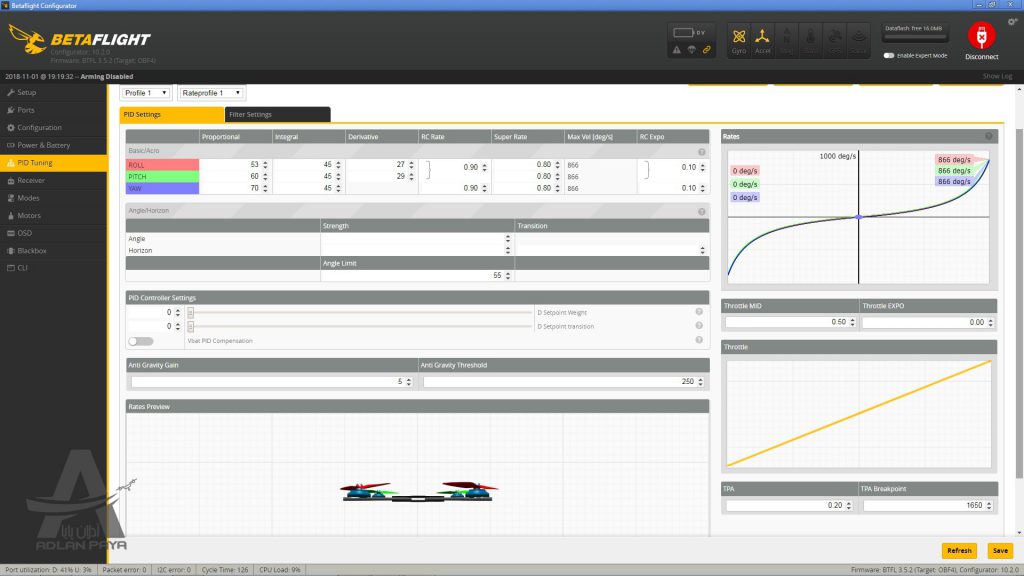
توصیه می ود تا افرادری که به تازگی کار با مولتی روتور ها و کواد کوپتر هارا شروع کرده اند تمام تنظیمات موجود در این تب را به صورت پیش فرض قرار دهند و هیچونه تغییری ایجاد نکنند.و بعد از کسب تجربه و بالاتر رفتن اطلاعات درباره نحوه عملکرد مولتی روتور ها میتوانید در این قسمت به شخصی سازی تنظیمات مورد تمایل خود بپردازید.
برای اطلاع از نحوه عملکرد ضرایب PID و نحوه تنظیم آن ها میتوانید مقاله مربوط به ضرایب PID را مطالعه کنید.











