

فعال سازی و تنظیم مود نجات GPS در قسمت CLI نرم افزار بتافلایت ( BetaFlight Configuration ) دقیقا مانند حالت بازگشت به خانه یا به اصطلاح Return to Home در کواد کوپتر ها و مولتی روتور های DJI است. این مود به شما برای بازگشت ایمن کواد کوپتر یا مولتی روتور خود هنگامی که سیگنال ضعیف شده و یا از دست می رود کمک می کند.
اما قابل ذکر است این مود به اندازه مود RETURN TO HOME دقیق نیست و پرنده شما در نقطه مشخصی فرود نخواهد آمد اما با استفاده از این مود پروازی کواد کوپتر شما به حدود محل پرواز باز خواه دگشت و این مقدار برای این که شما سیگنال از دست رفته خود را دوباره بدست آورده و بتوانید بر روی کواد کوپر خود کنترل داشته باشید کافی خواهد بود.
استفاده از این مود زمانی برای شما ضروری می شود که قصد پرواز در محدوده بسیار بزرگ و فاصله بسیار دوری را دارید که در آن احتمال از دست رفتن سیگنال بسیار بالا است.
آماده سازی های قبل فعال سازی مود نجات جی پی اس
- فلایت کنترلر خود را به بتافلایت ورژن 3.5 و یا بالاتر فلش کنید.
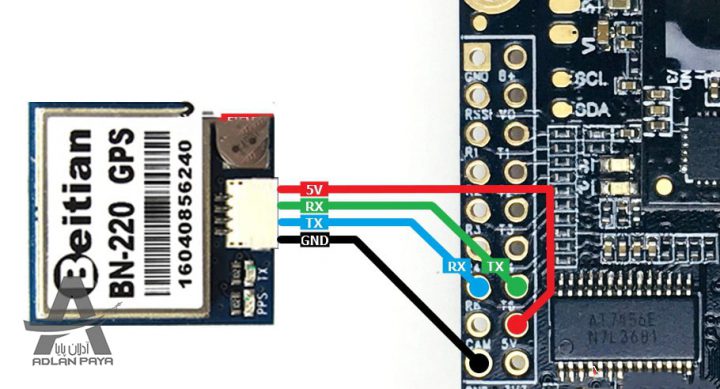
- GPS را بر روی کواد کوپتر و یا مولتی روتور خود نصب کنید ( برای آموزش نصب GPS بر روی کواد کوپترمی توانید مقاله مربوطه در در این قسمت مشاهده کنید ) .
استفاده از تمام سنسور های موجود در فلایت کنترل مورد نیاز نخواهد بود اما استفاده از دو سنسور جایرو و شتاب سنج طبق معمول ضروری بوده و با استفاده از بارومتر نیز می توانید به عملکرد بهتر مود نجات GPS در تشخیص ارتفاع کمک کنید ، اما استفاده از سنسور بارومتر ضروری نیست و با استفاده از داده های GPS نیز می توان حدود ارتفاع را بدست آورد.
فعال و سازی و تنظیمات مود نجات جی پی اس
برای عمکلرد صحیح و هرچه دقیق تر این مود برای کواد کوپتر و یا مولتی روتور خود نیاز دارید تا تنظیمات بتافلایت را در بتافلایت CLI کمی تغییر دهید. اما از ایجاد هرگونه تغییر در تنظیم بتافلایت مطمعا شوید که وظیفه هر گزینه و پارامتر را در این نرم افزار به خوبی می دانید و آگاهی کامل دارید.
برای تنظیم GPS می توانید به تب CLI در بتافلایت رفته و متن GET GPS را برای دریافت تمام پارامتر های موجود برای تنظیمات GPS را دریافت کنید.
در ادامه آموزش تنظیم GPS به صورت پیشنهادی برای شما قرار داده شده است……
در تب CLI بتافلایت برای مشخص کردن حداقل فاصله کواد کوپتر جهت فعال شدن مود نجات GPS متن زیر را تایپ کنید. این مقدار به صورت پیش فرض بر روی 100 متر تنظیم شده است و به این دلیل تعریف می شود که با نزدیک شدن کواد کوپتر و دریافت سیگنال بتوانید کنترل کواد کوپتر را به دست بگیرید اما مراقب باشید که این مقدار را بیش از حد کم نکنید تا باعث بروز اتفاقات ناخواسته به دلیل عدم داشتن کنترل بر روی کواد کوپتر خود نشوید.
set gps_rescue_min_dth = 100
با تایپ متن زیر حداقل تعداد ماهواره هایی که برای فعال شدن مود نجات GPS نیاز است را مشخص می کنید. در صورتی که تعداد ماهواره هایی که GPS به آن متصل است از مقداری که شما تایین کرده اید کمتر باشد GPS شما فعال نخواهد شد.
در صورتی که قبل از اتصال ماهواره های کافی اقدام به پرواز کنید این مود برای شما کار نخواه کرد.
set gps_rescue_min_sats = 6
در قسمت زیر نیز زاویه پروازی کواد کوپتر و مولتی روتور خود را مشخص خواهید کرد. با تنظیم این مقدار کواد کوپتر شما بعد از فعال شدن مود نجات GPS با زاویه تایین شده به سمت مبدا پرواز خواهد کرد.با تنظیم این مقدار کمتر از 30 درجه کواد کوپتر شما در مواجهه با باد های مخالف دچار مشکل خواهد شد. و اگر ای مقدار از 45 درجه بیشتر شود ممکن است کواد کوپتر قدرت ماندن در هوا را نداشته باشد.
برای تنظیم این مقدار نیاز دارید تا ابتدا شتاب سنج خود را فعال کنید و از عملکرد صحیح سنسور فلایت کنترلر خود اظمینان حاصل کنید در غیر این صورت کواد کوپتر و یا مولتی روتورشما امکان پرواز با زاویه تایین شده را نخواهد داشت.
set gps_rescue_angle = 45
با تایپ متن زیر نیز مسافتی که کواد کوپتر شما با رسیدن با آن مسافت شروع به کاهش سرعت خواهد کرد را مشخص می کنید. فاصله مطمعا بین مبدا و محلی که کواد کوپتر شروع به کاهش سرعت می کند حدود 200 متر است. پس به دلیل اینکه ما تا فاصله 100 متری مبدا مود نجات GPS خود را خاموش کرده ایم ، فاصله کاهش سرعت را بر روی 200 متر تنظیم می کنیم.
set gps_rescue_descent_distance = 200
در قسمت زیر نیز ارتفاع پروازی کواد کوپتر خود برای بازگشت به مبدا را تایین خواهید کرد. توجه داشته باشید که ارتفاع باید آنقدر زیاد باشد که از برخورد با درختان و سایر موانع جلوگیری کرده و نه آنقدر زیاد که باعث مصرف بیش ازحد باتری شده و باعث خارج شدن کواد کوپتر از دید شما شود.
set gps_rescue_initial_alt = 50
در قسمت بعدی سرعت بازگشت کواد کوپتر به مبدا را تنظیم می کنیم . این مقدار به صورت پیش فرض 2000 متر بر ثانیه است که کمی زیاده روی به نظر می رسد پس ما آن را بر روی نصف مقدار تایین شده یعنی 100 متر بر ثانیه تنظیم خواهیم کرد.
set gps_rescue_ground_speed = 1000
برخی ممکن است به دلیل روشن بودن ویژگی SANITY CHECK با مشکل DISARM شدن ناگهانی در طول پرواز روبرو شوند. این ویژگی برای قطع کردن حرکت مولتی روتور زمانی که به جایی برخورد می کند طراحی شده است. برای جلوگیری از مشکل هایی این چنین این ویژگی را طوری تنظیم می کنیم که صرفا در صورت فعال بودن FAILSAFE فعال شود. برای انجام این کار متن زیر را در بتافلایت CLI تایپ کنید.
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
فعال سازی مود نجات GPS در بتافلایت
برای فعال سازی و تنظیم مود نجات GPS در بتافلایت دو راه وجود دارد. یا استفاده از FAISAFE و یا تعیین یک یوییچ بر روی رادیو کنترل. برای تست نحوه عملکرد این مود بهتر است قبل از تنظیم بر روی FAILSAFE ابتدا با تنظیم یک سوییچ بر روی رادیو کنترل از عملکرد درست این مود مطمعا شوید.
برای فعال سازی و تنظیم این مود به تب MODES در بتافلایت بروید و بر روی گزینه GPS RESCUE کلیک کنید.سپس مقادیر حد اقل و حد اکثر این مود را تنظیم کنید.

تست عملکرد مود نجات جی پی اس
برای تست اولیه ملخ ها را از روی موتور ها باز کرده و کواد کوپتر را را اندازی کنید. سپس فعال شدن این مود را با سوییپ تنظیم شده تست کنید.
سپس کواد کوپتر ویا مولتی روتور خود را به محلی ایمن و بدون موانع اضافی برده و مود نجات GPS که تنظیم کرده اید را تست کنید.
با فعال کردن OSD می توانید تمامی عملکرد های کواد کوپتر خود را بر روی عینک FPV و یا مانیتور مشاهده کنید.

نکته:
- با فعال کردن OSD می توانید تعداد ماهواره هایی که GPS شما به آن متصل است را مشاهده کنید و تا قبل از اتصال به ماهواه های کافی از فعال کردن مود نجات GPS خود داری کنید.
- همچنین در حین فعال سازی این مود می توانید مسیر حرکت ، دور و یا نزدیک شدن کواد کوپتر خود را بر روی OSD با فلش کوچک بر روی صفحه مشاهده کنید. در صورتی که این فلش به سمت بالا بود یعنی کواد کوپتر در حال نزدیک شدن به مبدا می باشد اما اگر فلش به سمت پایین بود یعنی کواد کوپتر شما در حال دور شدن از مبدا بوده و ممکن است از دسترس شما خارج شود پس هرچه سریع تر کنترل کواد خود را به دست بگیرید.
فعال سازی مود نجات GPS در FAILSAFE
بعد از اینکه از عملکرد درست تنظیمات خود اطمینان حاصل کردید می توانید مود نجات GPS را در حالت FAILSAFE خود تنظیم کنید.برای این کار به CLI در بتافلایت بروید و متن زیر را تایپ کنید.
set failsafe_procedure = GPS-RESCUE
save
لازم به ذکر است که با تنظیم بر روی FAILSAFE کواد کوپتر شما با قطع شدن سیگنال رادیو بر روی مود نجاتGPS رفته و بعد از وصل شدن دوباره سیگنال به حالت ACRO باز خواهد گشت.اما اتصال سیگنال رادیویی به معنی برقراری اتصال ویدئویی نیست و ممکن است با وصل شدن سیگنال هنوز تصویر دریافتی شما متصل نشده باشد و شما مجبور به پرواز با چشمان بسته باشید.
برای جلوگیری از این کار حتما یک سوییچ برای تنظیم مود نجات GPS داشته باشید و بعد فعال شدن FAILSAFE سوییچ را بر روی مود نجات GPS تنظیم کنید و تا دریافت تصویر خروجی از کوادکوپتر اقدام به بازگردانی در حالت ACRO نکنید.











