

ضریب D جزئی از ضرایب PID در فلایت کنترلر است که برای پایداری کواد کوپتر در هنگام پرواز استفاده می شود. اما افزایش بی رویه ضریب D هنگام تنظیم کردن ضرایب PID باعث بروز نوسانات اضافه شده و تاثیر زیاد در اعمال، فشار بی رویه بر موتور براشلس و در نتیجه داغ کردن بیش از حد موتور دارد. در این مقاله قصد داریم تا به بررسی دلایل بروز این گونه اتفاقات بپردازیم.
معرفی کامل مفهوم اندازه گیری مقدار مورد نظر ( Set-Point Measurement )
همانطور که می دانید ضرایب PID و تنظیم آن که ضریب D نیز جزو این دسته است وظیفه کنترل سرعت چرخش هر موتور را برای برقراری تعادل پایدار در هر لحظه از پرواز و با هر مقدار Trottle را بر عهده دارند ، که به SET-POINT معروف است. از طرف دیگر سنسوری به نام سرعت سنج زاویه ای و یا به اصطلاح جایرو ( Gyro ) نیز مقدار حرکت زاویه ای و زاویه نسبت به خط افق را در کواد کوپتر به صورت لحظه ای برای ما ارسال می کند که این مقدار به نام Measurement شناخته می شود.
با تنظیم ضرایب PID میزان تاثیر گذاری اطلاعات بدست آمده از جایرو و مقدار مورد نظر ما برای رسیدن به تعادل را کنترل می کنیم و در واقع وظیفه ضرایب PID به حداقل رساندن اختلاف بین مقدار واقعی اندازه گیری شده توسط جایرو و مقدار مورد نظر ما است. این اختلاف بین دو مقدار دلخواه و واقعی نیز ERROR گفته می شود.
و اما واقعیت امر چیست؟
با کم و زیاد کردن مقدار Trottle به کواد کوپتر دستور می دهید تا جهت حرکت خود را در یک یا چند محور تغییر دهد. این مقدار Trottle ورودی به فلایت کنترلر را به عنوان مقدار مورد نظر( SET-POINT ) در نظر می گیریم. فلایت کنترلر مقدار واقعی و در واقع اطلاعات وضعیت کنونی کواد کوپتر را از جایرو دریافت می کند که به آن Measurement می گویند. به اختلاف بین مقدار مورد نظر ما برای وضعیت جدید کواد کوپتر و مقدار واقعی وضعیت کنونی کواد ERROR می گویند. حال فلایت کنترلر با تغییر وضعیت کواد کوپتر سعی دارد تا میزان اختلاف بین مقدار مورد نظر ما و مقدار واقعی را با استفاده از کم و زیاد کردن سرعت موتور ها توسط ضرایب PID تا حد زیادی کم کند.
کم کردن این اختلاف برای موتور ها زمان بر است چرا که تنظیم دقیق سرعت چرخش برای فلایت کنترلر کار آسانی نیست. برای رسیدن به سرعت و وضعیت مورد نظر، فلایت کنترلر ابتدا سرعت موتور ها را افزایش می دهد. اما به دلیل خطای اندازه گیری ، سرعت موتور ها از مقدار مورد نظر عبور کرده و بیشتر می شود. دوباره فلایت کنترلر سرعت موتور ها را برای برگشتن به وضعیت مورد نظر کاهش می دهد. این وضعیت تا زمان رسیدن به پایداری نسبی و مقدار مورد نظر ادامه پیدا خواهد کرد تا اختلاف بین مقدار واقعی و مقدار مورد نظر به صفر یا نزدیک صفر برسد.

تعریف اولیه ضریب D و شتاب تغییر مقدار ERROR
فلایت کنترل برای کم کردن اختلاف بین مقدار مورد نظر ما و مقدار واقعی موقعیت کوادکوپتر شروع به کم و یا زیاد کردن سرعت موتور ها می کند. این تغییر سرعت برای رسیدن به موقعیت مورد نظر با شتاب خاصی صورت می پذیرد که به شتاب تغییر مقدار ERRORE معروف است.
این شتاب با تغییر سریع و ناگهانی ERRORE زیاد شده و با آرام تر شدن تغییر و یا تغییر نکردن مقدار ERRORE نزدیک به صفر و صفر می شود. پس تا این قسمت فهمیدیم که مقدار شتاب تغییر ERRORE ربطی به مقدار ERRORE ندارد و صرفا رابطه مستقیمی با سرعت تغییر آن دارد.
حال در مورد ضریب PID صحبت میکنیم. ضریب D در هر لحظه در حال بررسی شتاب تغییر ERRORE است و همواره می کوشد تا این شتاب تغییر را به صفر و یا در حدود صفر نزدیک کند تا تاثیر خوبی در عمکلرد و پرواز کواد داشته باشد.
ضریب P همواره با مقدار ERRORE سرو کار دارد اما بر خلاف آن ضریب D به دنبال خنثی کردن شتاب تغییر آن است و به هیچ عنوان اهمیتی به زیاد و یا کم بودن مقدار ERRORE نمی دهد.
ارتباط بین مقدار ضریب D و نوسانات کواد کوپتر و داغ کردن بیش از حد موتور براشلس ها
با ارسال دستور از رادیو کنترل به فلایت مبنی بر وضعیت جدید کواد کوپتر ، فلایت کنترلر سرعت موتور ها را برای رسیدن به حالت جدید تغییر می دهد. این تغییر سرعت با شتاب خاصی اعمال می شود. ضریب D در تمام مدت تغییر سرعت موتور براشلس ها در تلاش است تا این شتاب تغییر را به صفر برساند.
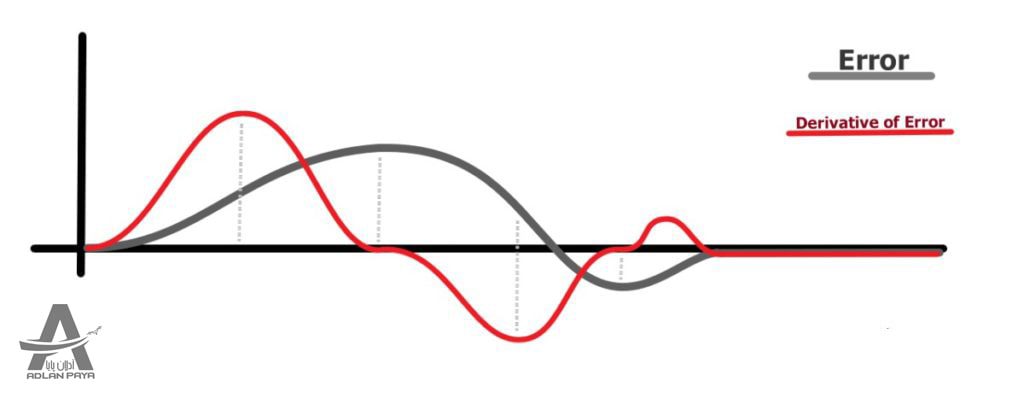
همانطور که در نمودار زیر مشاهده می کنید ، خط سبز رنگ دستور ورودی جدید از رادیو کنترل یا همان مقدار مورد نظر ( SET-POINT ) است. خط قرمز رنگ نیز شتاب تغییر ERROR و مقداری است که ضریب D سعی در خنثی کردن آن دارد. توجه می کنید که ما یک بار دستور جدید برای وضعیت سرعت موتور ها را ارسال کرده ایم اما سرعت موتور ها 6 بار تغییر کرده است تا به مقدار مورد نظر برسد.

با افزایش بیش از حد مقدار D ، این ضریب ، عکس العمل ها و حساسیت بیشتری نسبت به تغییر جزئی تر شتاب ERROR خواهد داشت و باعث تعداد دفعات بیشتری برای تغییر سرعت موتور خواهد شد و در نتیجه فشار بیشتری به موتور وارد می شود. این فشار وارده نیز باعث ایجاد نوسانات ریز و لرزش های کوچک در کواد کوپتر شده و همچنین باعث داغ شد بیش از حد موتور ها می شود. زمانی این وضعیت به بدترین حالت خود می رسد که نوسانات ایجاد شده نیز بر محاسبات فلایت کنترلر تاثیر گذاشته و فلایت سعی در خنثی کردن آن ها نیز داشته باشد. این کار یک چرخه معیوب از تلاش های بی ثمر برای پایدار کردن کواد کوپتر و مولتی روتور شما به وجود می آورد.
نتیجه گیری
پس فهمیدیم که افزایش بیش از حد مقدار ضریب D نه تنها در بهبود عمکلرد و پایداری پرواز کواد کوپتر ومولتی روتور شما تاثیر ندارد بلکه باعث ایجاد نوسانات بیشتر و بدتر شدن عملکرد کوادکوپتر نیز خواهد شد.











