

در این مقاله درباره بخش های مختلف تنظیمات سنسور ها و رادیو کنترل DJI در نرم افزار پرواز دی جی ای 4 ( DJI GO 4 ) بحث خواهیم کرد. شما می توانید قسمت قبل را از اینجا مشاهده کنید.
Visual system navigation
در این قسمت از نرم افزار پرواز دی جی ای 4 ( DJI GO 4 ) شما می توانید مشخص کنید که کدام یک از سنسور ها فعال و یا غیر فعال باشند . توصیه می شود در هنگام پرواز این سنسور ها همیشه روشن و فعال باشند تا از خطرات احتمالی جلوگیری شود.
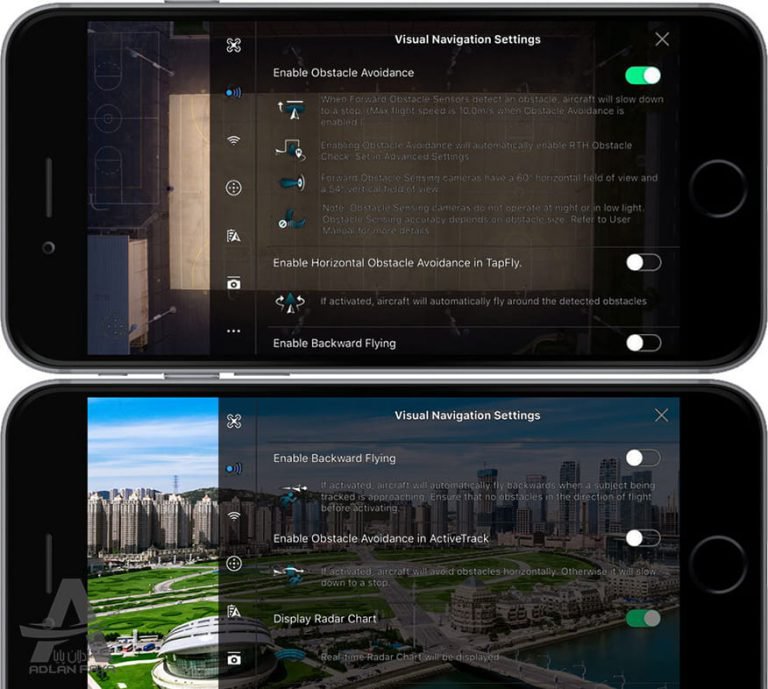
Enable Obstacle Avoidance
با فعال کردن این دستور مولتی روتور یا کوادکوپتر شما می تواند موانع مقابل سنسور را تشخیص دهد . البته به هنگام فعال بودن این سیستم حداکثر سرعت پهپاد شما کاهش می یابد تا بتواند در صورت تشخیص موانع از برخورد با آن ها جلوگیری کند.
البته میزان تشخیص این سنسور ها به میزان روشنایی هوا نیز بستگی دارد و در صورت کم نور بودن محیط نمی توانند موانع را تشخیص دهند.
Enable Horizontal Obstacle Avoidance in Tapfly
در مود Tapfly و در صورت فعال بودن این قسمت مولتی روتور یا کوادکوپتر شما در صورت تشخیص موانع از بخورد با آنها جلوگیری کرده ، آن ها را دور می زند و سپس به مسیر خود ادامه می دهد.
Enable Backward Flying
با استفاده از این قسمت از نرم افزار پرواز دی جی ای 4 ( DJI GO 4 ) در صورت نیاز ، ربات پرنده شما به عقب پرواز می کند. توجه داشته باشید که هیچ یک از مولتی روتور های DJI به جز Phantom 4 Pro دارای سنسور پشت نیستند و در صورت وجود موانع در پشت آن ها حتما کرش و سقوط رخ می دهد.
Enable Obstacle Avoidance in Active Track
در مود Active Track در صورت وجود موانع در مقابل سنسور های مولتی روتور یا کوادکوپتر شما مسیر خود را تغییر داده و از برخورد با آن جلوگیری می کنند. در صورت غیر فعال بودن این حالت نیز پرنده شما در موقعیت خود ثابت می شود.
Display Radar Chart
اگر این قسمت فعال باشد در گوشه صفحه پرواز نرم افزار دی جی ای 4 یک نقشه کوچک به همراه نمایش موقعیت و جهت حرکت شما نمایش خواهد داد.
در ادامه درباره تنظیمات سنسور ها و رادیو کنترل های DJI در این نرم افزار بحث می کنیم.
تنظیمات پیشرفته ( Advanced ) سنسور ها
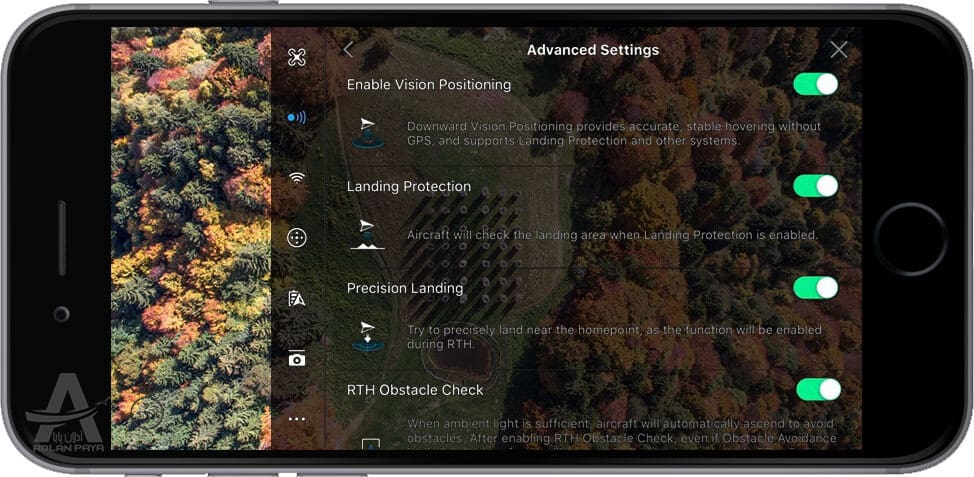
Vision Positioning : در صورت فعال بودن این قسمت ، سنسور های کف پرنده روشن و فعال خواهند شد که به ثابت شدن پرنده و حفظ موقعیتش در هنگام پرواز کمک می کند.
Landing Protection : در صورت فعال بودن این قسمت مولتی روتور شما قبل از فرود آمدن ، محل فرود را چک کرده و در صورت ایمن بودن آن اقدام به فرود می کند.
Precision Landing : اگر این قسمت فعال باشد ربات پرنده شما در حالت RTH به مکانی که به عنوان Home انتخاب کرده اید باز می گردد.
RTH Obstacle Check : در صورت تشخیص موانع در هنگام بازگشت به خانه ( RTH ) ، مولتی روتور و کوادکوپتر شما به صورت خودکار صعود می کند.
تنظیمات رادیو کنترل یا ریموت کنترل در نرم افزار دی جی ای 4 ( DJI GO 4 )
کالیبراسیون
شما می توانید رادیو کنترل خود را در این قسمت کالیبره کنید . توجه داشته باشید که کالیبراسیون رادیو کنترل یا ریموت کنترل فقط باید هنگامی که مولتی روتور یا کواد کوپتر شما خاموش است انجام شود.
Mode Stick
در قسمت Mode Stick نرم افزار دی جی ای 4 ( DJI GO 4 ) می توانید یکی از مود های قرار داده شده یا یک مود به صورت دلخواه برای دستورات مورد استفاده در استیک ها و دکمه های رادیو کنترل خود استفاده کنید. معمولا مود 2 یک مود عامیانه و مورد استفاده در در بین اکثر پایلوت ها می باشد.
Set To Fixed-Wing Mode
این قسمت ، حالت پرنده پال ثابت را روشن یا خاموش می کند. البته به این معنی نیست که مولتی روتور تغییر حالت ظاهری دهد. فقط با سرعتی مشخص رو به سمت جلو حرکت می کند. شما با بالا و پایین کردن تراتل می توانید ارتفاع آن را تنظیم کنید. همچنین برای چرخش باید هر دو استیک را به سمت جهت مورد نظر بچرخانید.
Remote Controller LCD Screen Introduction : این قسمت به شما توضیحاتی درباره اطلاعات به نمایش گذاشته شده توسط رادیو کنترل می دهد.
Button Customization : دو دکمه در زیر رادیو کنترل های DJI برای شما تعبیه شده است. شما می توانید در این قسمت انتخاب کنید هر یک از این دکمه ها چه کاربردی داشته باشند. کار هایی که می توان با آن ها انجام داد در همان قسمت نوشته شده است.
Remote Controller Type : اگر شما بخواهید مولتی روتور یا کوادکوپتر خود را به دو رادیوکنترل متصل کنید باید در این قسمت تعیین کنید که کدام یک از رادیو کنترل های به عنوان Master و کدام یک Slave باشند.
Linking Remote Controller : این قسمت نیز مربوط به اتصال رادیو کنترل به مولتی روتور یا کواد کوپتر می باشد.











