

با سلام در این مقاله مروری کوتاه بر تاریخچه فلایت کنترلر مولتی روتور ها یا به اختصار فلایت کنترل (FC ) ها خواهیم داشت.
قدیمی تر های دنیای مولتی روتور حتما اسم فلایت کنترل kk را شنیده اند این فلایت کنترلر را می توان به عنوان اولین فلایت کنترل رسمی در دنیای مولتی روتور ها شناخت یک آیسی AVR و 3 عدد سنسور جایروسکوپ که دارای خروجی آنالوگ بودند اجزای اصلی این فلایت کنترل را تشکیل می دادند. علاوه بر این قطعات 3 عدد پتانسیومتر وجود داشت که با کمک آن ها می توانستیم این فلایت کنترل را تنظیم کنیم .
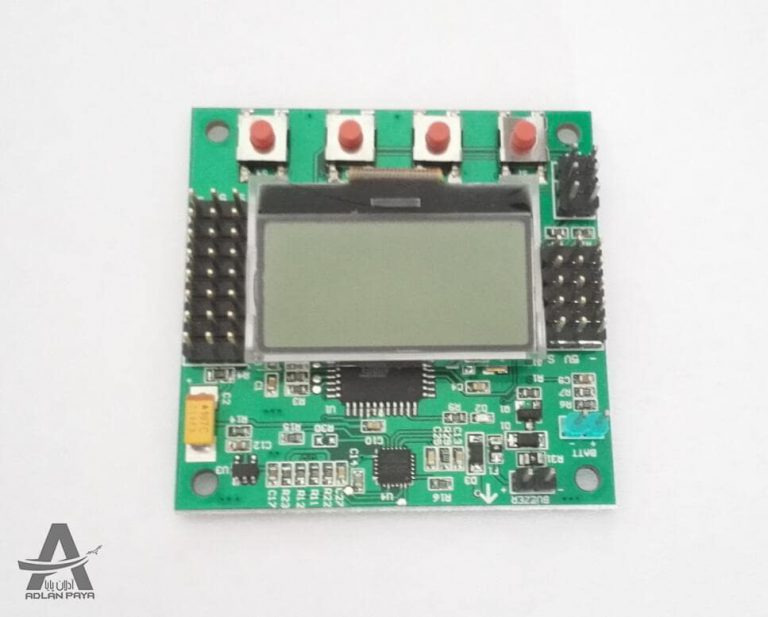
جالب است بدانید که این فلایت کنترلر فقط مود پروازی اکرو ( acro mode ) را ساپورت می کرد که در ادامه روند توسعه ای که داشت توانست با اضافه کردن یک lcd گرافیکی و سنسور شتاب سنج مود پروازی استابلایزر یا همان استیبل مود ( stb mode ) را به امکانات خودش اضافه کند . می توان گفت که فلایت کنترلر kk بعد از این پیشرفت دیگری نداشت و در همان مود استیبل و رابط گرافیکی ساده باقی ماند دلیل این امر نیز استفاده از زبان برنامه نویسی C و کامپایلر کدویژن بود که باعث سخت کردن توسعه این سیستم توسط کاربران خود شده بود.
آردوینو انقلابی در دنیای مولتی روتور
انتشار نسخه اولیه آردوینو با استقبال بی سابقه کاربران و علاقه مندان به رشته الکترونیک مواجه شد که کم کم کاربران و علاقه مندان عرصه مولتی روتور ها را نیز تحت تاثیر قرار داد و به داخل این رشته وارد کرد .در ابتدا ابزاری برای ساخت و طراحی سیستم های جانبی برای مولتی روتور ها و فلایت کنترلر ها شد و در ادامه جایگاه فلایت کنترلر kk را تصاحب کرد و پروژه مولتی وی شکل گرفت .
مولتی وی انقلابی در دنیای فلایت کنترلر ها

مولتی وی یک پروژه متن باز بود که با استفاده از سخت افزار آردوینو پرو مینی و یک سنسور دسته بازی wii کار خودش را شروع کرد. در ابتدا یک فلایت کنترلر ساده با کدهای بسیار خوانا و روان بود که روی پلتفرم متن باز آردوینو کار می کرد و همین امر باعث شد که به شدت پیشرفت کند و خیلی زود تر از حد تصور به یک اتوپایلوت حرفه در زمان خود تبدیل شود . حال آنقدر پیشرفت کرده بود که سنسورهایی نظیر بارومتر، قطب نما، فشارسنج و جی پی اس های مختلفی را به راحتی ساپورت می کرد. مود های پروازی کنترل ارتفاع و کنترل موقعیت را در خود جای داده بود و کیفیت پرواز مناسبی را اراعه می کرد. اما این نقطه اوج مولتی وی زیاد طول نکشید و حالا کمتر کسی پیدا می شود که از این پروژه استفاده کند .
شرکت ST شتاب دهنده فلایت کنترلر های مولتی روتور ها
همه چیز خوب پیش می رفت تا این که دوستداران عرصه پهپاد و مولتی روتور در دنیا زیاد شدند و همین موضوع باعث ورود افراد حرفه ای تر رشته الکترونیک و برنامه نویسی به این رشته شد . در همین حال شرکت ST سری پردازنده های 32 بیتی و خوش قیمت خود را در دل الکترونیک دوست ها جا کرد .
افراد حرفه ای و قطعات حرفه ای وتجربه کار با سیستم های قبلی و مشکلات خاص آنها باعث به وجود آمدن نسل جدیدی از فلایت کنترلر ها شد که از آیسی stmfxxx و ویژگی های فلایت کنترل مولتی وی استفاده می کردند.
base flight
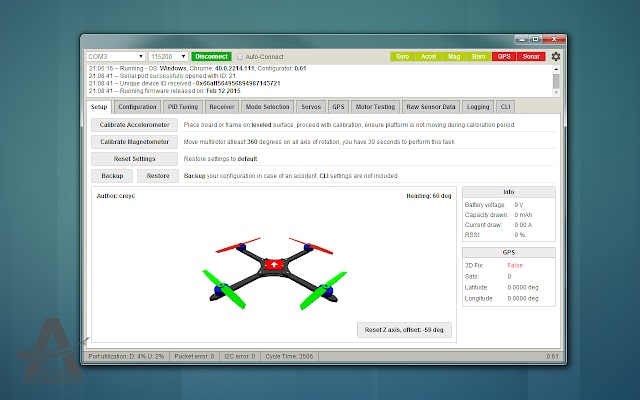
بیس فلایت همان فلایت کنترلر مولتی بود با این تفاوت که از سرعت اجرای برنامه بالا تری برخوردار بود. پردازنده 32 بیتی و رابط کاربری فلایت به chrome app تبدیل شده بود که در مرورگر گوگل کروم اجرا می شد.
cleanflight

کلین فلایت در واقع نسلی از فلایت کنترلر بود که فقط ویژگی های برتر بیس فلایت را به ارث برده بود. برای مثال هنوز هم خیلی از فلایت کنترلر های دنیای پهپاد ها و مولتی روتور ها از MSP یا به اصطلاح ( MultiWii Sreial Protocol) استفاده میکنند؛یا تا همین یک سال پیش کلین فلایت از فیلتر های تشخیص زاویه مولتی وی استفاده می کرد . اما در عین حال cleanflight کاملا متفاوت از مولتی وی است و هیچ اثری از مولتی وی در ظاهر کار وجود ندارد هرچند هنوز هم خون مولتی وی در رگ های این فریم ور در جریان است.
betaflight
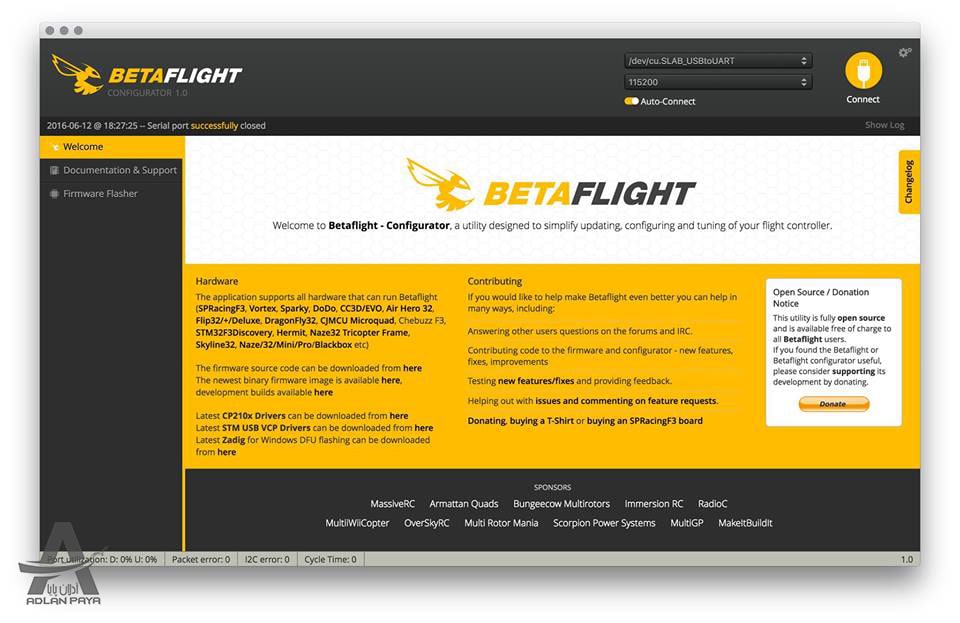
بعد از کلین فلایت فریم ور های زیادی روی کار آمدند تا مشکلات جزئی کلین فلایت را رفع کنند. بیس فلایت یکی از همین فلایت کنترلر ها بود که با بهبود کنترلر pid این cleanflight توانست جایگاه خودش را محکم کند.
به شما توصیه می کنیم : تنظیم ضرایب PID فلایت کنترل در مولتی روتور ها
و این داستان وراثت از فلایت کنترلر های قبلی همچنان ادامه دارد ….
منتظر قسمت دوم این مطلب باشید











