

در این مقاله تنظیمات ویژه ای که برای به پرواز درآوردن یک تری کوپتر ( TriCopter ) لازم است را به شما آموزش می دهیم .
همچنین برای مشاهده ی آموزش های دیگر برای راه اندازی سایر مولتی روتور ها می توانید به اینجا مراجعه کنید .
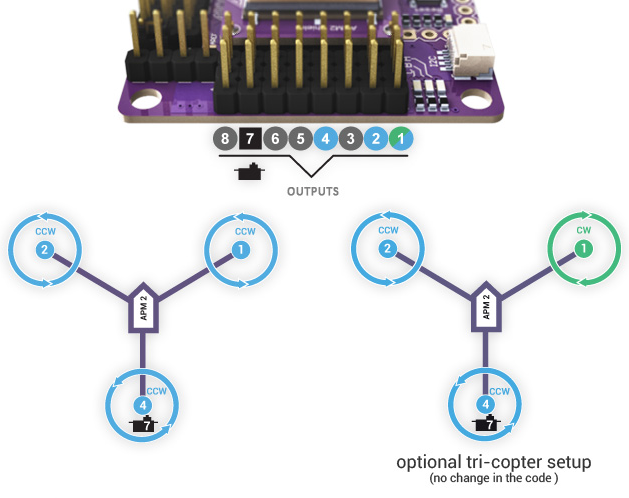
تنظیم تری کوپتر ( Tricopter Configuration )
در ادامه ی مطلب ، با توجه به ورژن فریمور فلایت کنترل شما ،تنظیمات مورد نیاز برای آماده سازی پررواز تری کوپتر شما قرار داده شده است .
تنظیم تری کوپتر با فریمور آردوپایلوت
Copter 3.5 ( و بالاتر )
با توجه به Copter-3.5.x ، همه فریمور های مولتی روتور ها ( کواد ، هگزا ، اکتا ، اکتا کواد ، y6 ، تری ، سینگل ، کواکس ) از جمله تری کوپتر در یک فریمور واحد قرار داده شده اند . بنابراین پس از بارگیری فریمور باید تنظیمات زیر را لحاظ کنید :
FRAME_CLASSبه 7 ( Tri )
جداسازی بهتر پارامترهای ورودی و خروجی RC نیز باعث تغییراتی در مقایسه با نسخه های قبلی شده است . در اینجا لیست کاملی از پارامترهای خاص تری کوپتر وجود دارد :
MOT_YAW_SV_ANGLE: حداکثر زاویه خم شدن سروو ی دم را بر حسب درجه تنظیم می کند . این امر باعث می شود تا زاویه ی مناسب برای تراست موتور عقب را فارهم کند .
مقدار این پارامتر به صورت پیش فرض 30 درجه است .SERVO7_MIN: کمترین مقدار PWM سروو عقب قبل از برقراری اتصال است .SERVO7_MAX: بالاترین مقدار PWM سروو عقب قبل از برقراری اتصال است .SERVO7_TRIM: مقدار PWM سروو دم که برای جلوگیری از چرخش به هنگام پرواز نیاز دارد .SERVO7_REVERSED: معکوس کردن تنظیمات سروو ی دم . با قرار دادن مقدار 0 برای این پارامتر تنظیمات به صورت پیش فرض است . با قرار دادن این مقدار برابر 1 تنظیمات معکوس می شود .
Copter 3.4.x
MOT_YAW_SV_ANGLE: حداکثر زاویه خم شدن سروو ی دم تری کوپتر را بر حسب درجه تنظیم می کند . این امر باعث می شود تا زاویه ی مناسب برای تراست موتور عقب را فارهم کند .
مقدار این پارامتر به صورت پیش فرض 30 درجه است .
کانال مورد استفاده برای سرو دم را می توان با تنظیم مقدار SERVOx_FUNCTION مناسب روی 39 ، از حالت پیش فرض آن ( کانال 7 ) تغییر داد . به عنوان مثال Pixracer فقط دارای 6 کانال خروجی می باشد بنابراین با قرار دادن مقدار SERVO5_FUNCTION برابر 39 می توان سروو دم را به کانال خروجی 5 منتقل کرد .
برای پارامترهای بیشتری که قابل تنظیم هستند ، به بخش Copter 3.3 در زیر مراجعه کنید .
Copter 3.3.x
MOT_YAW_SV_MIN: کمترین مقدار PWM سروو عقب قبل از برقراری اتصال است .MOT_YAW_SV_MAX: بالاترین مقدار PWM سروو عقب قبل از برقراری اتصال است .MOT_YAW_SV_TRIM: مقدار PWM سروو دم که برای جلوگیری از چرخش به هنگام پرواز نیاز دارد .MOT_YAW_SV_REV: معکوس کردن تنظیمات سروو ی دم . با قرار دادن مقدار 0 برای این پارامتر تنظیمات به صورت پیش فرض است . با قرار دادن این مقدار برابر 1 تنظیمات معکوس می شود .
Copter 3.2.1 ( و قبل از آن )
RC7_MIN: کمترین مقدار PWM سروو عقب قبل از برقراری اتصال است .RC7_MAX: بالاترین مقدار PWM سروو عقب قبل از برقراری اتصال است .RC7_MIN: مقدار PWM سروو دم که برای جلوگیری از چرخش به هنگام پرواز نیاز دارد .RC7_REVERSED: معکوس کردن تنظیمات سروو ی دم . با قرار دادن مقدار 0 برای این پارامتر تنظیمات به صورت پیش فرض است . با قرار دادن این مقدار برابر 1 تنظیمات معکوس می شود .
با اعمال این تنظیمات ، تنظیم تری کوپتر شما با فریمور آردوپایلوت پایان می یابد و می توانید یک پرواز خوب را با مولتی روتور خود ساخته ی خود ، داشته باشید .











