

برد های فلایت کنترلر دارای شتاب سنج هایی هستند که به لرزش بسیار حساس اند. برای نمایش موقعیت هواپیما یا مولتی روتور مقادیر اندازه گیری شده توسط شتاب سنج با بارومتر و داده های GPS ترکیب شده و موقعیت هواپیما یا مولتی روتور شما را در هوا مشخص می کند. با ارتعاشات بیش از حد پهپاد شما در هوا، مود های پروازی که وابسته به موقعیت هستند دچار مشکل می شوند(در مولتی روتور ها مود های پروازی که به موقعیت وابسته اند : AltHold و Loiter و RTL و Guided و Position و Auto mode هستند).
این دستورالعمل توضیح می دهد که چگونه لرزش مولتی روتور ها و هواپیما ها را اندازه گیری کنید. اگر متوجه شدید که آنها غیر قابل تحمل هستند، توصیه هایی که در مقاله ی استفاده از لرزش گیر در موتور براشلس و فلایت کنترلر برای کاهش نوسانات کوادکوپتر قرار داده شده است را مورد استفاده قرار دهید.
مشاهده ی در لحظه در ایستگاه زمینی
ایستگاه های زمینی می تواند یک نمایش در لحظه از لرزش را به ما نمایش دهند. در صورت استفاده از نرم افزار Mission Planner ، بر روی Vibe در HUD کلیک کنید تا میزان لرزش های در لحظه را نشان دهد.
لرزش های کمتر از 30m/s^2 نرمال و معمولی است. لرزش بیستر از 30m/s^2 ممکن است مشکلاتی را ایجاد کند و مقدار لرزش بالاتر از 60m/s^2 تقریبا همیشه در مود های پروازی position یا altitude hold مشکل ایجاد می کند.
گزارش لرزش پرواز dataflash
مقادر لرزش ضبط شده معمولا کمتر از 30m/s^2 است.
- انجام یک پرواز معمولی ( بدون ثابت نگه داشتن مولتی روتور در یک نقطه ) در حد چند دقیقه و گزارشات لرزش پرواز ( dataflash ) را دانلود کنید.
- از نرم افراز های Mission Planne یا دیگر نرم افزار های ایستگاه زمینی استفاده کنید تا نمودار لرزش دستگاه را در محور های x و y و z مشاهده کنید. این نمودار ها انحراف از مقدار استاندار شتاب سنج را بر حسب m/s^2 نمایش می دهند.
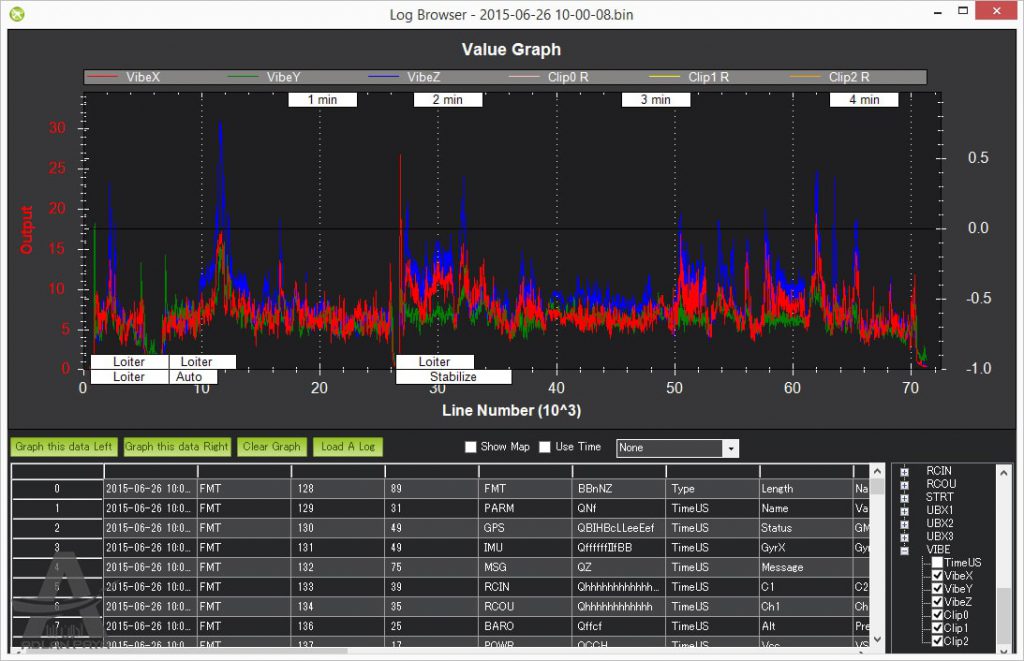
- تصویر زیر که از 3DR IRIS گرفته شده، سطح نرمال را که زیر 15m/s^2 است، اما گاهی تا مقدار 30m/s^2 اوج کرفته است که در تصویر نشان داده شده است. حداکثر مقادیر قابل قبول به نظر می رسد کمتر از 30m/s^2 باشید (نگاه کنید به تصویر دوم در زیر ).
- نمودار مقادیر Clip0 و Clip1 و Clip2 زمانی افزایش پیدا می کند که یکی از شتاب سنج ها به مقدار حداکثر خود (16G) برسد. در حالت ایده آل این مقادیر باید در تمام طول پرواز صفر باشد، اما مقادیر کمتر 100 هم مناسب است، به خصوص اگر فرود های سختی را داشته باشند. اگر به طور مرتب این لرزش ها در سیستم شما وجود دارد باید مشکل را بر طرف کنید.
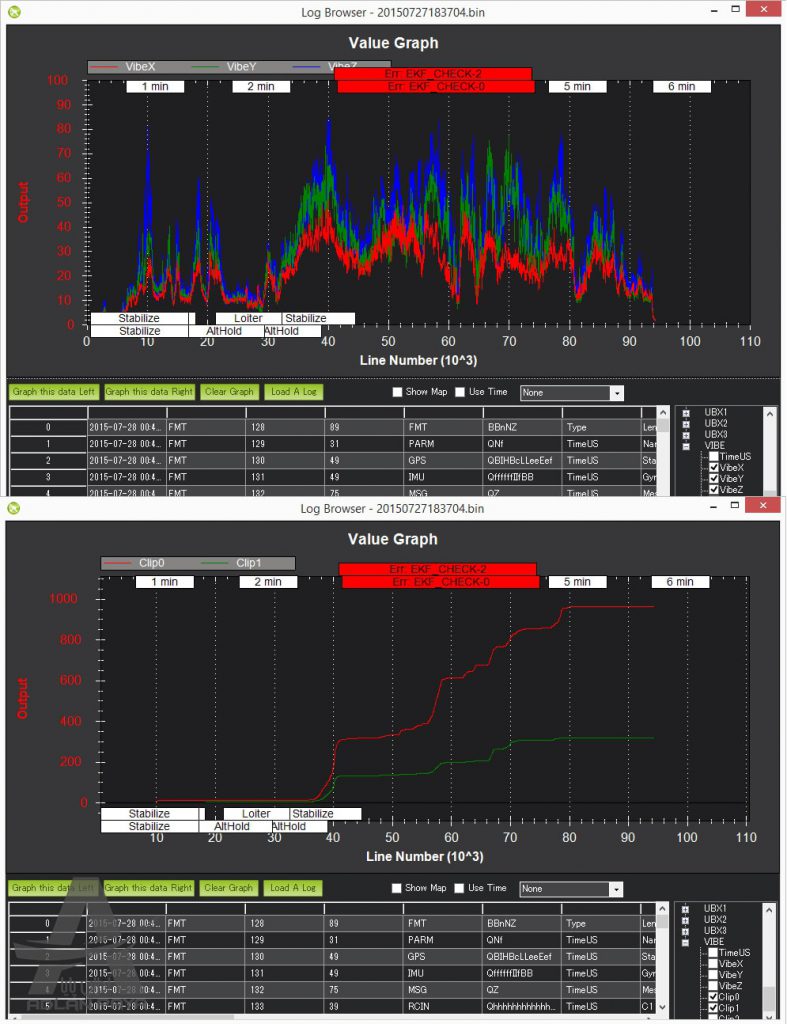
این یک نمونه از اطلاعات پروازی دارای لرزش های زیاد است که در مود پروازی Position دچار مشکل شده است.
الگوریتم محاسبه مقدار لرزش را می توان در روش calc_vibration_and_clipping () AP_InertialSensor.cpp مشاهده کرد ( در مدت زمان کوتاه ). محاسبه خطای استاندارد شتاب سنج مانند این است:
- مقادیر اولیه x، y و z شتاب سنج را از IMU دریافت کنید.
- فیلترهای بالا در مقادیر اولیه در 5hz برای حذف حرکت پهپاد و accel_vibe_floor را برای محور x، y و z ایجاد کنید.
- تفاوت بین آخرین مقادیر شتاب و accel_vibe_floor را محاسبه کنید.
- جذر تفاوت های بالا، فیلتر در 2hz و سپس محاسبه جذر (برای x و y و z). این سه مقدار نهایی همان چیزی است که پیام لرزش، لرزش محور x و y و z ظاهر می شود.
درجستجوی برای The Leans
The Leans هنگامی اتفاق می افتد که مود های پروازی پهپاد ناکارآمد باشد و باعث شود که آن را به طور قابل توجه ی کاهش دهد حتی اگر خلبان سطح پرواز را مشخص کند. علت این مسئله، اغلب آلیاژ شتاب سنج است که می تواند با مقایسه مقادیر رول و پیچ در مود های پروازی از هر یک از سیستم های تخمینی (به عنوان مثال AHRS یا EKF) تایید شود. تخمین نگرش های پروازی باید در چند درجه از یکدیگر متفاوت باشند.
- ورودی dataflash را دانلود کرده و در اطلاعات پروازی را در ایستگاه زمینی باز کنید.
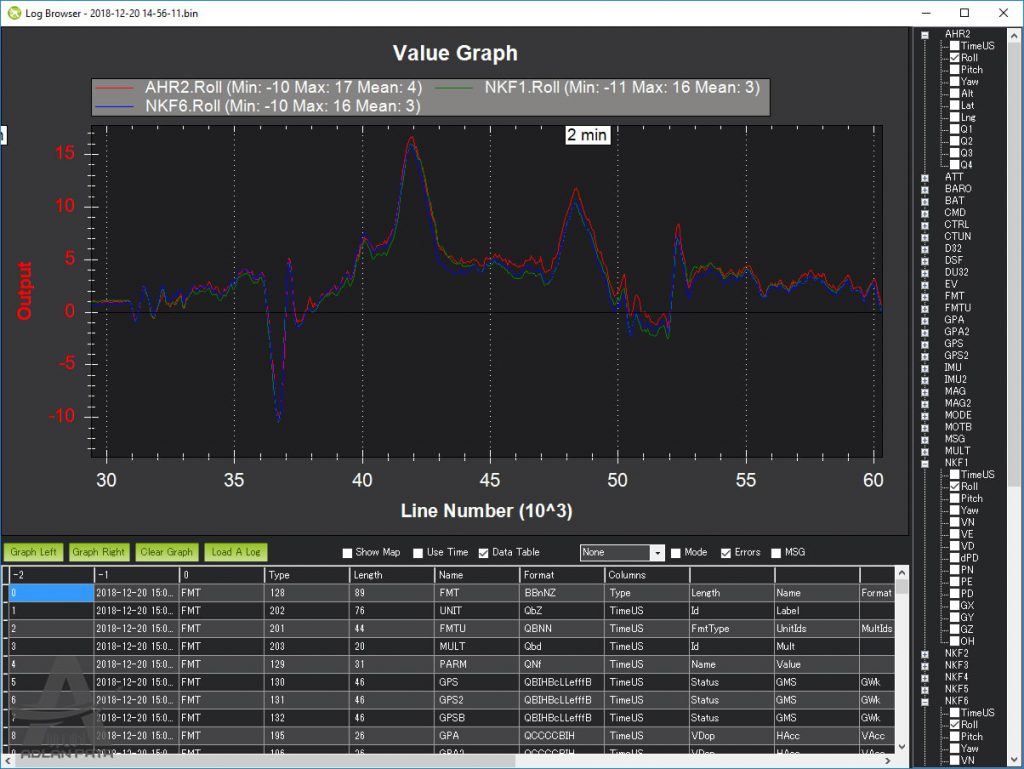
- مقایسه AHRS2.Roll و NKF1.Roll و NKF6.Roll
تصویر زیر یک ورودی معمولی را نشان می دهد که در آن نگرش ها به خوبی مطابقت دارند.
تجزیه و تحلیل پیشرفته با FFT
در آینده مقاله ای راجع به محاسبات در مورد چگونگی جمع آوری مقادیر زیاد داده های IMU و انجام تجزیه و تحلیل FFT را برای تعیین فرکانس با بیشترین لرزش را قرار می دهیم.
اطلاعات پروازی DATAflash IMU
نسخه های قدیم تر ARDUPILOT دارای هشدار لرزش نبودند و شما مجبور بودید مقادیر IMU را به صورت مستقیم چک کنید.
- مطمعا شوید پارامتر LOG _ BITMASK با اطلاعات IMU شما همگام سازی شده باشد. در این صورت اطلاعات شتاب سنج شما در اطلاعات پروازی DATAFLASH شما ثبت خواهد شد.
- کواد کوپتر خود را در حالت مود STABLEپرواز دهید و سعی کنید آن را در حالت HOVER ( شناور ) ثابت نگه دارید.
- بعد از پرواز اطلاعات پروازی DATAFLASH کواد کوپتر خود را دانلود کنید و در Mission planner در قسمت Rewiew Log فایل آخرین اطلاعات پروازی ذخیره شده را باز کنید.
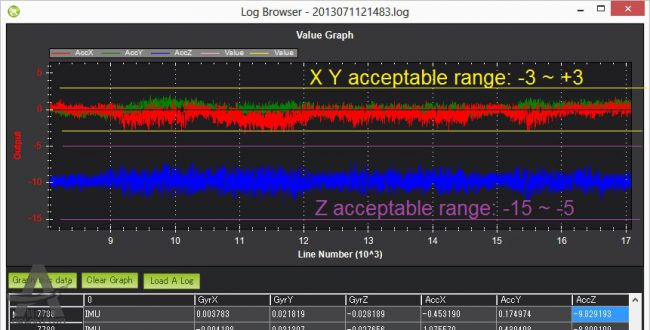
- وقتی قسمت سرچ نرم افزار باز شد. به سمت پایین صفحه بروید تا اطلاعات مربوط به پیام IMU خود را پیدا کنید. گزینه Raw AccX را انتخاب کرده و گزینه Graph this data را انتخاب کنید.این مراحل را برای AccY و AccZ هم تکرار کنید.
- مقایس نمودار های خود را بررسی کنید و مطمعا شوید تا برای AccY و AccX این مقدار بین 3- و 3+ باشد. برای Accz مقدار قابل قبول اندازه ای بین 15- و +15 خواهد داشت.
- بعد از انجام تمام مراحل بالا به صفحه Standard Parameters در Mission Planner بروید و مقدار LOG BITMASK را به حالت DEFAULT بر گردانید. این کار بسیار حائز اهمیت است.











