

یکی از مشکلات عمده ای که کاربران در رابطه با کوادکوپتر ها و مولتی روتور ها با آن مواجه می شوند خراب بودن یکی از پین های خروجی موتور براشلس ها در فلایت کنترلر است که باعث درست عمل نکردن موتور در پرواز ها و تست ها می شود.در این مقاله قصد داریم تا چند نکته در مورد تعمیر پین سیگنال فلایت کنترلر را با شما در میان بگذاریم.
قبلا از انجام هر کاری از قطع بودن پین خروجی موتور در فلایت کنترلر اطمینان حاصل کنید
ابتدایی ترین کاری که در تعمیر پین خروجی موتور در فلایت کنترلر باید انجام داد اطمینان حاصل کردن از قطع بودن پین و عمل نکردن موتور براشلس به دلیل معیوب بودن پین سیگنال فلایت کنترلر است.ممکن است مشکلات ایجاد شده برای موتور چیزی به جز یک پین معیوب بر روی فلایت کنترلر باشد.
پس بهتر است برای اطمینان از این موضوع چک لیست زیر را برای پیدا کردن سایر مشکلات احتمالی دنبال کنید.
سیستم برق رسانی اسپید کنترل را بررسی کنید
یکی از مشکلاتی که ممکن است برای موتور براشلس ها ایجاد شود اشکال در سیستم برق رسانی به اسپید کنترل است.برای اطمینان از تنظیم بودن ولتاژ می توانید ولتاژ ورودی به اسپید کنترل را با استفاده از مولتی متر اندازه گیری کنید.
به بوق هایی که موتور در آغاز برق رسانی تولید میکند توجه کنید
تمام موتور براشلس ها پس از اتصال به اسپید کنترل و راه اندازی ، شروع به ایجاد صداهایی بوق مانند برای اطلاع رسانی مبنی بر سالم بودن موتور و اسپید کنترل جهت حرکت کردن به کاربر می کنند.شما نیز باید به دقت به این صداها توجه کنید تا مشکلات ایجاد شده احتمالی در این سیستم را پیدا کنید.
اطلاع رسانی و بوق زدن موتور ها بعد از روشن شدن به صورت زیر خواهد بود.
- پس از متصل کردن باتری به موتور براشلس و اسپید کنترل ، موتور شروع به ایجاد 3 بوق کوتاه پشت سر هم مبنی بر برق رسانی درست و کامل به اسپید کنترل خواهد کرد.
- چند ثانیه بعد از این بوق ، موتور شروع به ایجاد 2 بوق دیگر اما طولانی تر خواهد کرد که به معنی دریافت سیگنال TROTTLE توسط اسپید کنترل است.
اگر شما بوق مرحله اول را نشنیدید به دلیل مشکل در سیستم برق رسانی به اسپید کنترل و موتور براشلس های شما خواهد بود.
اما در صورت نشنیدن بوق های مرحله دوم به این معنی است که اسپید کنترل سیگنال خروجی از فلایت کنترلر که توسط سیم سیگنال به اسپید می رسد را به هر دلیل دریافت نمی کند.برای چک کردن و رفع این مشکل دو احتمال وجود دارد.
- سیم سیگنال که یک پروتکل ارتباطی بین فلایت کنترلر و اسپید کنترلر است در قسمتی دچار خرابی و یا قطعی شده است.
- پین سیگنال فلایت کنترلر به هر دلیل در قسمتی به زمین و یا سایر پین ها اتصال دارد ودر ارسال سیگنال اختلال ایجاد می کند.
بررسی پین خروجی موتور در فلایت کنترلر
برای بررسی خرابی و معیوب بودن پین خروجی موتور در فلایت کنترلر می توانید ولتاژ خروجی برای هر 4 موتور براشلس را با یکدیگر برای پیدا کردن اختلاف مقایسه کنید.
برای این کار می توانید سیم سیگنال متصل شده از فلایت کنترلر به اسپید کنترلر را جدا کنید و با کم و زیاد کردن TROTTLE مقدار ولتاژ خروجی را برای هر پین در هر موتور مقایسه کنید.چرا که تمام فلایت کنترلر ها برای ارتباط با اسپید کنترلر از دو پروتکل ارتباطی آنالوگ و یا دیجیتال استفاده خواهند کرد و تغییر مقدار TROTTLE باعث ایجاد نوسان وکم و زیاد شدن ولتاژ خروجی از فلایت کنترلر خواهد شد.
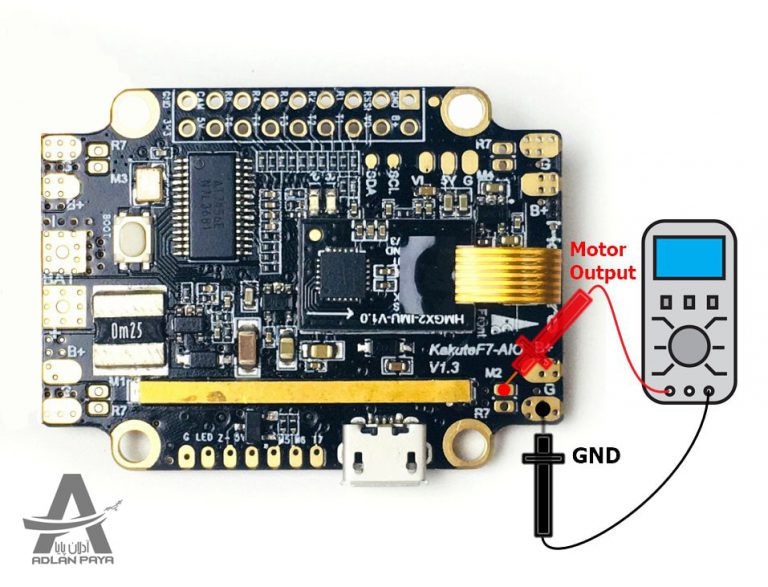
برای خواندن ولتاژ خروجی موتور ها فلایت کنترل را بعد از جدا کردن سیم سیگنال اسپید کنترلر به سیستم متصل کنید.درحالی که سیم قرمز مولتی روتور را بر روی پین خروجی موتور و سیم مشکی را بر روی پین زمین ( GND ) نگه داشته اید ، می توانید اقدام به خواندن ولتاژ کنید.
در صورت سالم بودن هر 4 خروجی تمام آن ها باید در شرایط و مقدار TROTTLE برابر ولتاژ یکسانی را نیز نمایش بدهند.
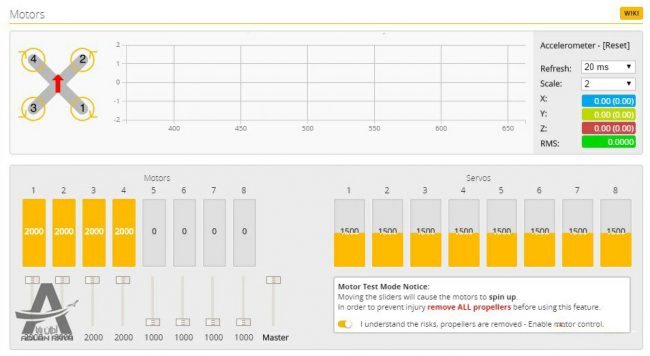
پس برای این کار در منوی MOTORS در پیکربندی بتافلایت ( Betaflight Configurator ) اسلایدر تمام موتور ها را در دو حالت صفر درصدی و صد در صدی قرار دهید.در این حالت اگر شما از پروتکل های آنالوگ مانند PWM , oneshot و Multishot استفاده می کنید ولتاژ خروجی در حالت صفر در صدی باید چیزی در حدود 1.5 ولت و در حالت صد در صدی 3 ولت باشد.در مورد پروتکل های دیجیتال مانند Dshot نیز در حالت صفر درصدی 0.2 ولت و در حالت صد درصدی 0.4 ولت می باشد.
تذکر:
تاکید می کنم که در این اندازه گیری رسیدن ولتاژ ها به مقدار مورد نظر اصلا مهم نیست و ما به دنبال این هستیم که برابری ولتاژ هر 4 موتور را در هر اندازه ای که هست بسنجیم.در صورتی که در این تست یکی از خروجی موتور ها ولتاژی متفاوت از سایر خروجی ها داشت و یا اصلا خروجی نداشت به معنی خرابی و مشکل پین فلایت کنترلر است.
تغییر کاربری پین خروجی موتور ها
برای رفع مشکل خرابی پین خروجی موتور در فلایت کنترلر می توانید از سایر پین های موجود در فلایت کنترل که در حال حاضر کاربرد خاصی برای شما ندارد مانند پین های PPM و LED و SoftSerial استفاده کنید.
اما برای مطمعا شدن از مناسب ترین پین جهت انجام این کار می بایست توضیحات و مشخصات فلایت کنترلر خود را مطالعه کنید.











