

در این مقاله به شما آموزش می دهیم که چرا و چگونه یک GPS در Betaflight یک کوادکوپتر تنظیم می کنید . همچنین سعی می کنیم چند ماژول GPS را برای مولتی روتور به شما معرفی کنیم .
چرا ماژول GPS را در مولتی روتور ها نصب می کنیم ؟
شما می توانید اطلاعات مفیدی را بر روی OSD خود به نمایش بگذارید ؛ که شامل موقعیت پهپاد ، فاصله آن تا محل شروع پرواز ، سرعت حرکت ، ارتفاع و … می شوند. در صورت کرش کردن شما می توانید با استفاده از آخرین مختصات دریافتی از GPS محل سقوط را راحت تر پیدا کنید .

اگر از تلمتری بر روی گیرنده ی خود از قبیل X4R یا R-XSR استفاده می کنید، می توانید به صورت لحظه ای اطلاعات GPS خود را بر روی رادیو Taranis خود ارسال کنید . این راه برای پیدا کردن پهپاد سقوط کرده ی شما بهتر است .
برای اینکه فریمور فلایت کنترلر ویژگی هایی مانند بازگشت به خانه ( Return to Home ) یا Position Hold را پشتیبانی کند مولتی روتور شما نیاز به ماژول GPS دارد.
در Betaflight یک خصوصیت دیگر نیز وجود دارد که Rescue Mode نام گرفته است و کاربردی مانند RTH ) Return to Home ) دارد . این ویژگی به پهپاد شما این امکان را می دهد که در صورت از دست دادن سیگنال و ارتباط رادیویی با گیرنده، پرنده را به صورت خودکار به سمت مکان پرواز هدایت کند . پس می توانیم به این نتیجه برسیم که GPS نقش مهمی در Betaflight و پهپاد ها دارد .
کدام ماژول GPS را انتخاب کنیم ؟
در مینی کواد ها، به علت فضای محدود در آن ها باید یک ماژول کوچک انتخاب کنیم. معمولا در این مواقع از BN-220 یا BN-180 استفاده می کنند .این دو مدل از نظر اندازه تفاوتی با هم ندارند .BN-180 فلش مموری برای ذخیره ی تنظیمات و پیکربندی ندارد، اما نیازی به تغییر تنظیمات نیز ندارد .
یک ماژول دیگر به نام BN-880 وجود دارد که مقداری بزرگتر است اما دارای قطب نما نیز می باشد . در مولتی روتور های بزرگتر این مدل محبوب است .
اتصال ماژول GPS و فلایت کنترل
سیم کشی ماژول GPS به فلایت کنترلر راحت و مستقیم است ؛ کافیست آن را به UART متصل کرده و با 5 ولت تغزیه کنید .
چگونه GPS را در Betaflight راه اندازی کنیم ؟
در Betaflight در صفحه ی ports در زیر Sensor input ، گزینه ی GPS را برای UART که به گیرنده ی GPS متصل است انتخاب کنید .
در تب یا صفحه ی Configuration :
GPS را فعال کنید .
پروتکل را انتخاب کنید ( UBLOX یا NMEA ). معمولا UBLOX استفاده می شود اما اگر به کار نمی آید از دیگر پروتکل ها استفاده کنید.
پیکربندی خودکار را فعال کنید .
ذخیره کرده و مجددا راه اندازی کنید.
هنگامی که شما سیم کشی کرده و مراحل بالا را به درستی تنظیم کرده اید، باید روشن شدن چراغ نشانگر GPS را در بالای تنظیم کننده ببینید.
اکنون باید صبر کنید تا GPS شما 3D fix را دریافت کند ( حداقل به 4 ماهواره باید متصل باشد ).بسته به موقعیتی که قرار دارید این کار ممکن است چند دقیقه طول بکشد. وقتی این کار انجام شد LED قرمز رنگ در ماژول BN-220 باید چشمک بزند ( همراه با چراغ آبی ). حال اطلاعات مربوط به GPS را در صفحه Setup مشاهده خواهید کرد ؛ جایی که درستی 3D fix را تایید و مشخصات را نشان می دهد .

زمانی که ماژول GPS را برای اولین بار در یک مکان جدید روشن می کنید ، همیشه مقداری بیشتر طول می کشد تا ماهواره ها را پیدا کند .اما در دفعات بعدی این کار را سریع تر انجام می دهد .
ممکن است شما در خانه باشید و قصد پرواز در بیرون از خانه را داشته باشید . برای نمایش اطلاعات شما به دو گزینه ی تلمتری و OSD نیاز دارید. کار دیگری که می توانید انجام دهید این است که به کمک تلمتری از رادیو Taranis خود استفاده کنید تا مختصات در زمان واقعی را به شما نشان دهد . این باعث می شود در صورت کرش کردن پرنده را به راحتی پیدا کنید .
پرنده را روشن کرده ، به صفحه ی تلمتری Taranis بروید . گزینه ی یافتن سنسور های جدید ( Discover new sensors ) را انتخاب کنید. اکنون باید سنسور های جدید مثل GPS ظاهر شوند .
برای آزمایش صحت اطلاعات ارسالی GPS ، آن را به نقاط مختلف برده و مختصات دریافتی را ثبت نمایید . سپس آن مختصات را در گوگل مپ زده و درستی آن را چک کنید .
نکات نصب ماژول GPS
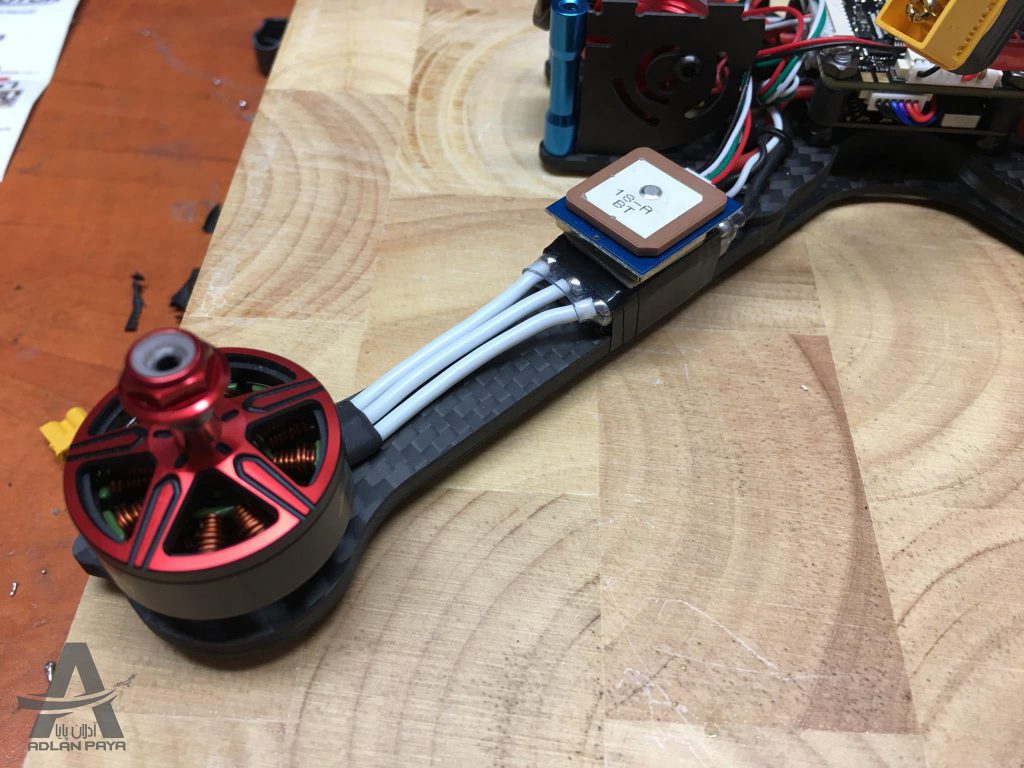
مطمعن شوید هیچ چیز در هیچ زمانی در کار GPS تداخل به وجود نمی آورد یا مانع آن نمی شود . آن را در بالای مولتی روتور خود نصب کرده و تا حد امکان از فرستنده تصویر دور کنید . با قرار دادن سیم هایی با طول کافی اجازه دهید در حالتی انعطاف پذیر باشد. GPS همیشه باید رو به آسمان باشد تا کارایی بهتری داشته باشد ( به جز شرایط خاصی از پرواز ).
سنسور های اضافی همراه GPS
این ماژول به سنسور اضافی نیازی ندارد. اما با ترکیب و اندازه گیری سنسور های دیگر می تواند اطلاعات را دقیق تر و بهتر به شما ارسال کند .
بارومتر ( فشارسنج )
بارومتر یک سنسور فشار هوا است که می تواند ارتفاع مولتی روتور را اندازه گیری کند. دقت این سنسور از تخمین GPS بیش تر است. معمولا فلایت کنترلر ها این سنسور را دارند و از مدل BMP280 استفاده می کنند .
قطب نما
قطب نما برای تشخیص دادن جهت حرکت مولتی روتور است و معمولا یک سنسور خارجی است که از طریق پورت i2c به فلایت کنترلر متصل می شود.











