

در این مقاله به بررسی کنترل دوربین در ماموریت های خودکار ( Mission Planner ) ، دستورات دوربین و گیمبال در آردوپایلوت و نحوه ی استفاده از این دستورات در Mission Planner برای تعریف ماموریت نقشه برداری با دوربین می پردازیم .
کنترل دوربین در ماموریت های خودکار
بررسی اجمالی دستورات دوربین و گیمبال در آردوپایلوت
تعریف یک ماموریت دوربین تقریباً مشابه برنامه ریزی یک ماموریت با مشخص کردن مسیر حرکت و رویداد ها است.
تنها تفاوت این است که در یک مأموریت دوربین ، شما دستوراتی را برای فشردن دکمه ی شاتر دوربین در ایستگاه های راه یا در فواصل منظم هنگام حرکت دستگاه مشخص می کنید .
اگر دوربین روی یک گیمبال سوار شده باشد ، شما همچنین می توانید جهت گیمبال را تنظیم کنید ، یا آن را در یک نقطه ی خاص ثابت کنید .
برای ماموریت های ساده می توانید ایستگاه های بین راه و دستورات دوربین را به صورت دستی مشخص کنید . برای مسیرهای پیچیده تر و بررسی های شبکه ، Mission Planner با فراهم کردن ابزارهایی برای تولید خودکار ماموریت مورد نیاز برای مناطق دلخواه ، کار را آسان می کند .
دستورات دوربین ( Camera commands )
DO_SET_CAM_TRIGG_DIST: شاتر دوربین را در فواصل منظم فشرده شود . این بیشتر برای استفاده در نقشه برداری هوایی استفاده می شود .DO_DIGICAM_CONTROL: هر بار که این دستور فرا خوانده می شود ، شاتر دوربین را یک بار فشرده می شود .
دستورات گیمبال دوربین
اگر از یک گیمبال دوربین استفاده می شود ، می توانید موقعیت دوربین ( yaw ، tilt ، roll ) را تنظیم کنید یا آن را در یک منطقه خاص ( ROI ) قرار دهید :
DO_SET_ROI: دوربین را به سمت یک منطقه مورد نظر مشخص ( موقعیت ، به همراه ارتفاع ) هدف قرار دهید .DO_MOUNT_CONTROL: گیمبال را با رول ، پیچ و یاو مشخص شده قرار دهید .
دستورات سروو و رله
با استفاده از دستورات DO_SET_SERVO یا DO_SET_RELAY به ترتیب ، سروو ها و خروجی رله ها می توانند به سخت افزار وصل شده و در حین مأموریت ها فعال شوند .
یکی از کاربردهای احتمالی برای این خروجی ها ، کنترل ویژگی های دوربین غیر از شاتر است ( برای مثال ، تنظیم میزان بزرگنمایی یا تغییر حالت عکس برداری به حالت فیلم برداری ).
انواع ماموریت خودکار
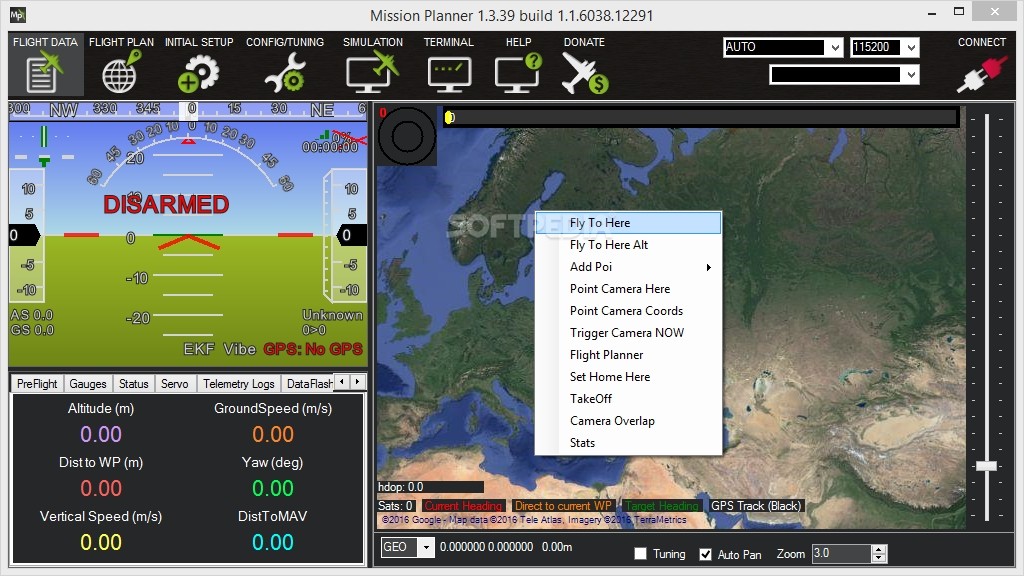
Mission Planner از گزینه های Auto Waypoint زیر پشتیبانی می کند . برای دسترسی به این موارد ، صفحه Flight Plan را باز کنید ، روی نقشه راست کلیک کرده و از زیر منوی Auto WP یکی از گزینه را انتخاب کنید :
- Create WP Circle : دایره ایستگاه های بین راه را ایجاد کنید .
- Area : مساحت چند ضلعی فعلی ( در صورت تعریف ) را نشان می دهد .
- Create Spline Circle : دایره ای که در آن ارتفاع نقاط ایستاده از خط طولی ( مربوط به وسایل نقلیه پرواز ) پیروی می کند .
- ( Survey ( Grid : به طور خودکار ایستگاه های بین راه و فرمان های کنترل دوربین را برای بررسی چند ضلعی مشخص ایجاد کنید .
- ( Survey ( Gridv2 : در دست ساخت ! این یک کنترل شبکه ساده تر برای ایجاد یک منطقه نقشه برداری مستطیلی است .
- SimpleGrid : یک شبکه نظرسنجی خودکار ایجاد شده است . کنترل دوربین تعریف نشده است ، بنابراین باید به صورت جداگانه اضافه شود .











