

بیشتر نرم افزار های به کار برده شده در مولتی روتور ها از جمله betafligh و kiss به کاربر اجازه دسترسی و تغییر pid فلایت کنترل را می دهند تا به کمک آن بتوان کارایی پرواز را ارتقا داد.در این پست ما قصد داریم تا با ضرایب PID که از ضرایب P ، ضرایب D و ضرایب I تشکیل شده است و تاثیر آن بر حرکت و پایداری پهپاد نظیر PITCH ، YAW و ROLL آشنا شده و چند نکته راجع به تنظیم این ضرایب یاد بگیریم.
هنر تنظیم ضرایب pid کواد کوپتر ها
تنظیم ضرایب pid فلایت کنترل واقعا یک هنر محسوب میشود.درک پایدار کردن جنبه های مختلف پرواز برای گرفتن بهترین نتیجه از استایل پروازی خود.در یک شب اتفاق نمی افتد.
شما ممکن است مولتی روتوری را بخواهید که با آن بدون نوسان و لرزش پرواز کرده و احساس راحتی کنید. یا دوست داشته باشید فرمان دادن خیلی نرمی بدون احساس درهم ریختگی داشته باشید.کلید تمام این ها در پیدا کردن بالانس پهپاد است.
شناخت دانش تنظیم ضرایب pid به شما کمک خواهد کرد تا به این pid برسید. و هرچه بیشتر با این ضرایب سرو کله بزنید.کار شما برای تظیم پرواز پهپاد به صورتی که شما میخواهید راحت تر است.
در دوره های اولیه که فریم ور فلایت کنترل ها بهینه سازی نشده بودند پهپهاد مجبور بود تا با ضرایب از پیش تعیین شده پرواز نامناسبی را داشته باشد که این امر تنطیم ضرایب pid را به ضرورت تبدیل کرد.اما دیگر این کار لااقل برای مینی مولتی روتور ها لازم نیست وبه لطف سیستم فبلتر های نویزگیر پیچیده و الگوریتم های بهینه سازی شده در برنامه فلایت کنترل های مدرن،این ارتقاع باعث پرواز عالی مولتی روتور ها شده است.
اما این به معنی اینکه میتوانید ضرایب pid را فراموش کنید نیست.همیشه جایی برای ارتقاء کارایی مولتی روتور ها هست.و وقتی صحبت از مولتی روتور های کوچک میشود هرکس علایق و عقیده ای در مورد مدیریت و کارکرد دارد.دانستن اینکه چطور ضرایب pid ظرفیت های تبدیل یک پرواز خوب به یک پرواز عالی در استایل های شخصی را دارد امری ضروری محسوب میشود.
ضرایب pid در مولتی روتور چیست
Pid مخفف Proportional, Integral, Derivative است.در واقع بخشی از نرم افزار فلایت کنترل بوده که اطلاعات سنسور را خوانده و محاسبه میکند که هرموتور برای حفظ سرعت و تعادل پهپاد چقدر و با چه سرعتی باید بچرخد. هدف ضرایب pid تصحیح خطای بین مقدار اندازه گیری شده از سنسور ژیروسکوپ و مقدار مورد تقاضا در فلایت کنترل است.این خطا را میتوان با تنظیم ورودی هر حلقه که سرعت موتور ها است کمتر کرد.
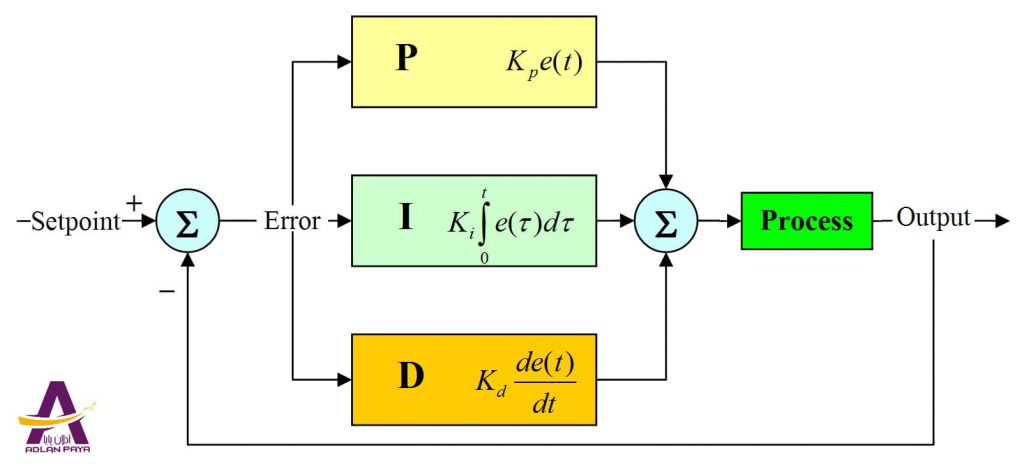
در یک کنترل کننده pid سه مقدار P،I وD وجود دارد:
مقدار p به خطای فعلی توجه میکند که از مقدار مورد تقاضا در فلایت نشات میگیرد.
مقدار d خطاهای احتمالی آینده را پیش بینی میکند با نگاه کردن به اینکه شما با چه سرعتی به مقدار مورد نظر درنزدیک میشوید و همینطور با مقدار p زمانی که به حد نصاب میرسد مقابله میکند.
مقدار I در واقع تجمع خطا های گذشته است و به نیروهایی که در طول زمان به پرنده وارد میشود توجه دارد .برای مثال اگر به کواد کوپتر به طور دائمی در طول پرواز باد نیرو وارد کرده و از نقطه مورد نظر دور کند ضریب I با زیاد کردن دور موتور کواد را به نقطه مورد نظر برمیگرداند.
تنظیم ضرایب pid مانند بازی گلف است
برای درک بهتر از مثال بازی گلف استفاده میکنیم.کاری که ضریبpid انجام میدهد مانند بازی گلف است به این صورت که شما تلاش دارید تا توپ را در سوراخی روی زمین بیاندازید.هر بارکه به توپ چه محکم و چه آرام ضربه میزنید به سوراخ نزدیک و نزدیک تر میشوید. و این ضربه زدن را تا زمانی که توپ درون سوراخ قرار بگیرد ادامه میدهید.تظیم ضرایب pid مانند افزایش مهارت بازی گلف است به گونه ای که با کمترین ضربات ممکن توپ را وارد سوراخ کنید.
looptime چیست
مدت زمانی که طول میکشد تا کنترلر pid اطلاعات را از سنسور های روی فلایت دریافت کرده و آنها را محاسبه کند looptime می نامند.فلایت کنترل های مدرن مورد استفاده در پهپاد های مسابقه توانایی هزار دور محاسبه را در یک ثانیه دارند.looptime میتواند در بازه زمانی میلی ثانیه اندازه گیری شود اما به طور معمول با HZ (هرتز) محاسبه میشود.
حلقه ای که 1 ثانیه زمان میبرد تا کامل شود = در هر ثانیه یک حلقه اجرا میشود = 1 هرتز
حلقه ای که 1 میلی ثانیه زمان میبرد تا کامل شود= 1 کیلو هرتز
امروزه امری طبیعی است که ببینیم فلایت کنترلی دارای looptime با 8 کیلو هرتز باشد.و حتی بعضی از آنها تا 32 کیلوهرتز هم توانایی دارند.اما اینکه آیا هر فلایت کنترلی سرعت پردازش بیشتری داشته باشد بهتر است یا نه باید در مقاله ای جدا توضیح داده شود.
تاثیر هرکدام از پارامتر های ضرایب pid
ضریب p
ضریب p مشخص میکند که فلایت کنترل چقدر سخت تلاش میکند تا خطا ها ی پروازی را تصحیح کرده و به مسیر پرواز مورد نظر برگردد.(برای مثال میتوان به جهت دادن خلبان به پهپاد توسط استیک ها اشاره کرد)
به این پارامتر میتوان به عنوان تنظیمات حساسیت و عکس العمل مولتی روتور نگاه کرد.عکس العمل سریع با بالارفتن ضریب p محیا میشود.این ضریب حتی باعث میشود شما حس کنید که سرعت خود را بالا برده اید.
به زبان ساده تر میتوان گفت که ضریب p بیشتر به معنی کنترل سریع تر و تیز تر و ضریب p کمتر به معنی کنترل نرم تر مولتی روتور است.
اگر ضریب p بیش از حد زیاد باشد باعث حساسیت به شدت بالای پرنده میشود و باعث میشود شما نوسانات ریز و زیادی را داشته باشید.
شما میتوانید ضریب p را کاهش دهید تا نوسانات کمتری داشته باشید اما کم کردن بیش از حد این ضریب نیز باعث نا موزونی و کند شدن حرکات در طول پرواز میشود.
ضریب i
این ضریب مشخص میکند که فلایت چقدر کار میکند تا پرنده را تحت تاثیر نیرو های خارجی نظیر باد ثابت نگه دارد.
در بتا فلایت ضریب i به خوبی کار میکند اما اگر شما متوجه حرکات و نوسانات در طولانی مدت شدید میتوانید آن را افزایش دهید.اگر این ضریب خیلی کم باشد ممکن است مجبور شوید خودتان با استفاده از استیک ها مسیر حرکت مولتی روتور را تنظیم کنید مخصوصا وقتی که از تراتل استفاده میکنید.
اگر این ضریب به شدت افزایش یابد باعث میشود مسیر حرکت پرنده به شدت محدود شود و مانند زمانی که ضریب p زیاد است باعث ایجاد لرزش ها و نوسانات ریز شود.
یکی دیگر از مواردی که پارامتر i می تواند آن را ارتقا داده و به آن پاسخ دهد کم کردن تراتل است .
در دنیای واقعی هیچ دو اسپید کنترل یا ملخی باهم یکی نیستند و در نتیجه تراست های مختلفی را حتی زمانی که با یک دور موتور میچرخند و تحت شرایط یکسانی اند ایجاد میکنند.زمانی که شما بلافاصله گاز خود را پایین میاورید یکی از موتور های شما ممکن است سرعت چرخش خود را بیشتر یا کمترنسبت به موتور دیگر تغییر دهد که این باعث حرکت ناگهانی ناخواسته میشود.
شما میتوانید با زیاد کردن ضریب i این مشکلات کوچک در پرواز را رفع کنید.برای جلوگیری از خشن بودن وسفتی ناخواسته در پرواز مولتی روتور به دلیل ضریب i زیاد ویژگی جدیدی در بتا فلایت ایجاد شده به نام anti gravity که به طور خلاصه به شما اجازه میدهد تا در دور زدن ضریب i کمتری را استفاده کنید و فقط زمانی که استارت حرکت از روی زمین(PUNCH OUT) را میزنید این ضریب را افزایش دهید.
ضریب d
این ضریب به عنوان ضربه گیر عمل کرده و خطاها و تصحیح بیش از حد ناشی از ضریب p را کاهش میدهد و ضربه ها را مهار میکند.اضافه کردن ضریب d میتواند باعث نرم تر شدن نوسانات شده و با افزایش بیش از حد ضریب p مقابله کند و نوسانات را به حد اقل برساند.
با کم کردن بیش از حد ضریب d پرنده شما نوسانات و جهش های بدی را در انتهای roll ها و flip (پشتک زدن) ها خواهد داشت. همینطور شما بدترین نوسانات را در حرکت عمودی تجربه خواهید کرد.
افزایش مقدار ضریب d میتواند این مشکلات را بهبود بخشد با این حال مقدار بیش از حد ضریب d میتواند باعث لرزش در پهپاد شما شود،زیرا نویز های سیستم را تقویت میکند که سر انجام باعث داغ شدن موتور و نوسان مولتی روتور می شود.
یکی دیگر از صورت های تاثیر افزایش بیش از حد ضریب d این است که باعث کاهش عکس العمل پهپاد میشود.
قبل از تنظیم ضرایب pid
از ضرایب pid فعلی خود یک نسخه بکاپ بگیرید تا درصورت به جود آمدن مشکل در ضرایب جدید بتوانید ضرایب قبلی را بازیابی کنید.
همیشه پرنده خود را روی مود rate تنطیم کنید.
مطمعا شوید مرکز ثقل(CG=center of gravity) پرنده همیشه در وسط باشد به این دلیل که مرکز ثقل روی نحوه پرواز پرنده بسیار تاثیر گذار است.
هیچ راه درست یا غلطی برای تنظیم ضرایب pid وجود ندارد.به عنوان مثال اگر دو پرنده یکسان را به دونفر بدهید آنها این فلایت کنترل و پرنده را با ضرایب pid متفاوت به صورت شبیه به هم تنظیم خواهند کرد طوری که خودشان با آن راحت تر کار کنند.
تکنیک ها و تنظیمات ضرایب pid پیشنهادی
پیشنهاد میشود همیشه در فلایت کنترل rc rate و super rate و expo را اول تنظیم کنید به خاطر اینکه کار با آن ها راحت تر است.سپس شما میتوانید ضرایب pid را تنظیم کرده و از هرگونه سردرگمی در این روند جلوگیری کنید.
ما همیشه سعی میکنیم تا پرنده ها و پهپاد های جدید را ابتدا با ضرایب pid از پیش تعریف شده خودشان امتحان و تست کنیم و سپس به تنظیم مجدد ضریبشان دست بزنیم.با فلایت کنترل های مدرن مانند betaflight, raceflight و kiss ضرایب های پیش فرض معمولا به خوبی جواب میدهند و بر روی اکثر ستاب ها پرواز خوبی را دارند.پس شما برای تنظیم مجدد این ضرایب ابتدا از مشکلات دیده شده در روند پرواز ضرایب از پیش تعیین شده نوت برداری کرده و سپس آنها را اصلاح کنید.
اما روش دیگر برای تنظیم ضرایب pid این است که تمام پارامتر ها را روی حداقل گذاشته و با زیاد کردن هرکدام به مقدار دلخواه به مود پروازی مد نظر برسید.
درهربار تنظیم فقط یک محور را مد نظر قرار دهید.ابتدا roll بعد pitch و در اخر yaw.ابتدا با تغییر یک پارامتر شروع کنید و نتیجه را برسی کرده و سپس سراغ پارامتر بعدی بروید.ابتدا ضریبp بعد ضریب d بعد ضریب I .اما شاید مجبور باشید تا با تغییر یک ضریب برگشته و ضریب قبلی را نیز تصحیح کنید زیرا تغییر هر ضریب بر ضریب های دیگر نیز تاثیر میگذارد.
تنظیم ضریب pid پرنده زمان بر است ممکن است 10 دقیقه و یا شاید چند روز طول بکشد که این امر به کیفیت قطعات مورد استفاده در پرنده ساختار پرنده و تجربه شما بستگی دارد.
نکته:همیشه قبل از آپدیت کردن ضرایب از آخرین ضرایب بکاپ بگیرید و قبلی ها را ریست کنید ها چون ممکن است فریمور تمام تنظیمات را کامل ریست کند.
تاثر ضریبp روی roll
با ضریب p تنظیم شده دور بزنید.اگر درست تنظیم شده باشد باید کنترل پهپاد دقیق باشد و بسیار نزدیک به استیک دادن شما حرکت خود را انجام دهد.
سعی کنید چند چرخش تیز بزنید(همزمان از استیک های throttle و roll استفاده کنید) اگر ضریب p خیلی کم باشد پهپاد به یک سمت کج خواهد شد.مانند تلو تلو خوردن یا نوسانات کم داشتن.اگر ضریب p خیلی زیاد باشد شما نوسانات بسیار سریعی را خواهید داشت. اگر ضریب درست تنظیم شده باشد شما کمترین نوسانات را خواهید داشت.
تاثیر ضریب p روی pitch
یک حرکت split-s انجام دهید(زمانی که از دو استیک throttle و pitch همزمان استفاده میکنید).زمانی که throttle را کم میکنید به حرکت pitch پرنده توجه داشته باشید اگر پرنده pitch رو به بالای بیشتر از حد انتظار داشت پس ضریب بسیار کم است و اگر نوسانات سریعی دیدید پس ضریب بسیار زیاد بوده و باید کم شود.
Tpa چیست
تنظیمات tpa برای کاهش تاثیر ضریب p روی افزایش trottle است.
اگر پرنده با تراتل های کم تا متوسط خوب عمل میکند اما با افزایش گاز شروع به لرزیدن میکند پس زیاد کردن tpa به شما کمک خواهد کرد.
استارت سریع(PUNCH OUT) انجام دهید و اگر نوسانات سریعی دیدید tpa را افزایش دهید.ضریب tpa خوب به شما استارت نسبتا روانی را خواهد داد.به توصیه شخصی ضریب tpa بیشتر از 0.4 نشود.
تاثیر ضریب d روی roll و pitch
وقتی شما مانور های خشن مثل flip و roll انجام می دهید و در انتهای کار پرنده شما نوسان می کند ضریب d را برای آن محور افزایش دهید.
مراقب باشید زیرا ضریب d بیش از حد باعث نوسانات زیاد بر روی پرنده شده و باعث داغ شدن موتور ها میشود.یکی دیگر از نشانه های مقدار زیاد ضریب d لرزش و نواسانات ولرزش های کوچک و شدید در انتهای pitch و roll است.
تاثیر ضریب i روی roll
به پرنده خود به سمت چپ و راست زاویه بدهید و ببینید که آیا زاویه را به درستی حفظ میکند یا نه.به طور معمول باید پرنده در زاویه ای که ما استیک را رها کرده ایم مانده و زوایه را به درستی حفظ کند.اگر اینطور نبود بدین معنی است که ضریب I بسیار کم است.
پرنده همراه با باد حرکت میکند پس بهتر است در روز های بادی ضریب I را افزایش دهیم.
تاثیر ضریب i روی pitch
در صورت حرکت رو به جلو پرنده باید زاویه را به درستی حفظ کند.اگر پرنده در حفظ زاویه مشکل داشت و بارها تغییر کرد باید ضریب I افزایش پیدا کند.
ضریب ANTI GRAVITY
چند بار در مسیر مستقیم پرواز کنید و استارت های پروازی (punch out) انجام دهید اگر پرنده کمی ارتفاع کم کرد ضریب ANTI GRAVITY را افزایش دهید.پیشنهاد میشود تا ضریب را بین 3 تا 5 قرار دهید.
تاثیر ضریب p روی YAW
ضرایب PID برای YAW باید به صورت جداگانه جداگانه تنظیم گردد اما تنظیمات پیش فرض معمولا به خوبی عمل میکنند.
با YAW به صورت سریع دور بزنید و بایستید اگر در آخر حرکت نوسانات سریع داشتید باید ضریب P را کاهش دهید. اما اگر پرنده به یک سمت تلو تلو خورد باید ضریب را افزایش دهید.
افزایش بیش از حد ضریب P در YAW لرزش های زیادی را به نسبت PITCH و ROLL ندارند چراکه حرکت yaw در مولتی روتور ها بسیار کمتر است.
تاثیر ضریب i روی YAW
ضریب I درمورد YAW برای جلوگیری از لغزش در دور زدن هاست اما نمیتواند حساسیت عکس العمل را کنترل کند.ضریب I برای YAW نباید بیشتر از حد مناسب به منظور جلوگیری از لغزیدن باشد.
تاثیر ضریب d روی وزن و SETPOINT TRANSITION
وزن مورد نظر بسیار مهم است.این وزن میتواند آثار تنظیم بد ضرایب هارا تا حدودی پوشش دهد و مدیریت حرکت پرنده را به اندازه تنظیم ضرایب PID آسان کند.
اگر وزن پرنده زیاد باشد تیک های حرکتی بیشتر شبیه به حرکت ربات ها خواهد داشت و در عین حال خشن تر نیز حس میشود.اگر وزن کمی داشته باشد روان تر خواهد بود و همچین کند تر و آزادانه تر حرکت خواهد کرد. درموردSETPOINT TRANSITION مسابقه دهنگان ترجیح میدهند تا ضریب بیشتری را قرار دهند در حالی که فری استایلر ها مقدار کمتری را مد نظر قرار میدهند.پیشنهاد میشود این ضریب را بین 0.9 1.0 قرار دهید.
برای SETPOINT TRANSITION مقدار زیاد باعث میشود احساس کنید پرنده آرام تر حرکت کرده و بین حرکات اکرو روان تر باشد.اما مقدار کمتر پهپاد را برای حرکات بعدی خشن تر و تیز تر نمایش میدهد.
SETPOINT transition از پیش تعیین شده (مقدار 1) به ما حد اکثر روانی حرکت را میدهد و از جهش ها حرکات اضافی در انتهای فلیپ ها و رول ها جلوگیری میکند.اما ما به شما پیشنهاد میکنیم برای این منظور مقدار کمتری را بین 0.1 تا 0.3 در نظر بگیرید که تعادل خوبی بین تیز بودن و روان بودن به شما میدهد.
نرخ تغییر تراتل در اسپید کنترل
مقدار پیش فرض به صورت 4 درصد برای شروع است که برای اکثر پهپاد ها خوب به نظر میرسد.با کم کردن این مقدار شما زمان بیشتری را در آسمان خواهید بود اما با کم کردن بیشتر از حد ، تا حدی کم شدن ارتفاع را پس از حرکاتی مانند فلیپ خواهیم داشت زیرا مدت زمانی طول میکشد تا دور موتور به سرعت مورد نیاز برگردد.
تمام لرزش ها و نوسانات ربطی به ضرایب pid ندارد
پیکربندی سخت افزار نقش مهمی در عملکرد مولتی روتور شما دارد.مواردی وجود دارد که شما باید قبل از هرکاری آنها را چک کنید.
لرزش ها
تمام نوسانات موجود در مولتی روتور به دلیل زیاد بودن بیش از حد ضرایب p یا d نیست و باید منشا اکثر لرزش هایی که میشود را از روی خود سازه پرنده رفع کرد و بعدا به تنظیم ضریب ها پرداخت از جمله بالانس موتور و ملخ ها تنظیم جداگانه فلایت ها و موتور ها در نوسانات بسیار تاثیر دارند.
مرکز ثقل(CG)
به طور معمول مرکز ثقل پهپاد باید در وسط آن باشد جایی که 4 موتور در یک خط و در یک صفحه قرار داشته باشند.و تا حد ممکن به خط اثر ملخ ها در یک راستا نزدیک باشند.
اگر مرکز ثقل پرنده در وسط نباشد یکی از موتور ها باید بیشتر از بقیه کار کند که این کار باعث نرسیدن به قدرت حداکثری موتور ها و داغ شدن یکی از آنها می شود.
توزیع توده ای و لحظه ای اینرسی
پهپاد هایی که تمرکز جرم آنها بیشتر در مرکز قرار دارد حساسیت و عکس العمل بیشتری نسبت به پهپاد هایی دارند که جرم آنها در اطراف پرنده پخش شده است و دراین مدل قدرت بیشتری برای چرخش ها و زمان بیشتری برای این کار نیاز دارد.به همین دلیل است که فریم های x شکل در مسابقات بیشتر استفاده میشود.











