ما در قسمت قبلی بررسی فلایت کنترل Pixhawk ، راجع به مشخصات فنی و انواع پورت های موجود روی این فلایت کنترل به همراه سیگنال ها و ولتاژ های مشخص شده برای هر پین بحث کردیم. در این قسمت از بررسی نیز ما پین های آنالوگ و دیجیتال روی این فلایت کنترلر را معرفی می کنیم.
پین ورودی آنالوگ فلایت کنترل Pixhawk
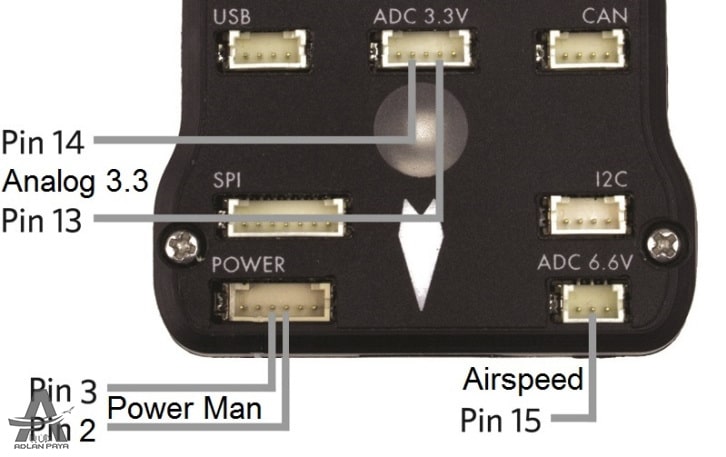
این بخش پین های آنالوگ موجود در فلایت کنترل Pixhawk را فهرست می کند. این پین ها مجازی هستند و در فریمور تعریف و شماره گزاری می شوند.
پین مجازی 2 و پین اتصال برق ( پین 4 ): پین ولتاژ، برقرار کننده ی جریان (تا 3.3 ولت) معمولا به یک ماژول قدرت با مقیاس 10.1:1 متصل می شود.
پین مجازی 3 و پین اتصال برق ( پین 3 ): پین کنترل کننده ی اتصال برق، تا 3.3 ولت برق گرفتن برای این پین پذیرفته شده است، معمولا به یک ماژول نیرو با مقیاس 17:1 متصل می شود.
پین مجازی 4 و (بدون پین اتصال دهنده): حسگر rail VCC 5V. این پین مجازی ولتاژ بر روی رله 5V را می خواند. برای خواندن ولتاژ از HWSTATUS.Vcc استفاده می شود که ایستگاه های زمینی (ground stations) برای نمایش وضعیت 5V استفاده می کنند.
پین مجازی 13 و ADC 3.3V پین اتصال 4: این پین حداکثر 3.3 ولت را می گیرد. ممکن است برای سونار یا سایر سنسورهای آنالوگ دیگر فلایت کنترل pixhawk استفاده شود.
پین مجازی 14 و ADC 3.3V پین اتصال 2: این پین هم حداکثر 3.3V را می گیرد. ممکن است برای سونار دوم یا دیگر سنسورهای آنالوگ استفاده شود.
پین مجازی 15 و ADC 6.6V پین اتصال 2: پورت سنسور سنجش سرعت باد آنالوگ (analog airspeed sensor). این در مقیاس 2:1 ساخته شده است، بنابراین می تواند تا ورودی های آنالوگ 6.6V را ساپورت کند. معمولا برای سنجش سرعت باد استفاده می شود، اما ممکن است برای هر سنسور آنالوگی استفاده شود.
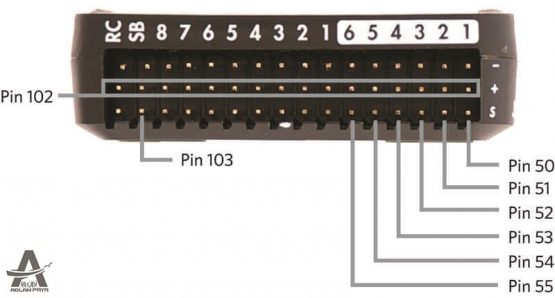
پین مجازی 102: ولتاژ rail قدرت سروو ها. این یک اندازه گیری ولتاژ داخلی سروو rail توسط برد های IO در فلایت کنترل های Pixhawk است. مقیاس آن 3:1 است و توانایی اندازه گیری ولتاژ تا 9.9V را دارد.
پین مجازی 103: RSSI (نشانگر قدرت سیگنال) ولتاژ پین ورودی (پین خروجی کانکتور SBus). این ولتاژ توسط پین ورودی RSSI در اتصال SBUS-out (پین مشخص شده) اندازه گیری می شود.
این می تواند به صورت SBus با تنظیم پارامتر BRD_SBUS_OUT در ( مولتی روتور ها ، هواپیما های مدل و قایق های کنترلی ) به طور متناوب عمل کند.
خروجی ها و ورودی های دیجیتال فلایت کنترل Pixhawk (پین های مجازی 50-55)
فلایت کنترل Pixhawk دارای خروجی دیجیتال اختصاصی یا پین های ورودی DF13 نیست، اما شما می توانید تا 6 کانکتور AUX SERVO را به خروجی و یا ورودی دیجیتال اختصاص دهید. این پین ها به عنوان پین AUX سروو در فلایت کنترل نمایش داده شده است (پین های 50-55 مشخص شده در تصویر بالا).
برای تنظیم تعداد این پین ها که به عنوان ورودی و خروجی دیجیتال در دسترس باشند، پارامتر BRD_PWM_COUNT را تنظیم کنید. در فلایت کنترل Pixhawk این پارامتر به صورت پیش فرض روی 4 است، که به این معنی است که 4 پین AUX برای خروجی PWM سروو ها علاوه بر 8 خروجی PWM دیگر در فلایت و 2 پین برای ورودی و خروجی دیجیتال است. اگر شما BRD_PWM_COUNT را روی 0 تنظیم کنید، شما 6 پین دیجیتال مجازی خواهید داشت و هنوز هم 8 خروجی PWM در بقیه کانکتور وجود دارد.
این 6 پین را از شماره ی 50 تا 55 شماره گزاری کرده ایم و قرار گیری پین های سررو AUX و پین های به این صورت است که اگر BRD_PWM_COUNT را برابر 4 قرار دهیم، پین های شماره ی 54 و 55 پین های خروجی دیجیتال شما می شود.
و به طور کلی؛
اگر BRD_PWM_CNT = 2 پس
50 = RC9
51 = RC10
52 = Aux 3
53 = Aux 4
54 = Aux 5
55 = Aux 6
اگر BRD_PWM_CNT = 4 سپس
50 = RC9
51 = RC10
52 = RC11
53 = RC12
54 = Aux 5
55 = Aux 6
اگر BRD_PWM_CNT = 6 پس
50 = RC9
51 = RC10
52 = RC11
53 = RC12
54 = RC13
55 = RC14