در این مقاله به بررسی مود FBWA در هواپیما های مدل ( FLY BY WIRE_A ) و حالت تنظیم خودکار PID ( مود AUTOTUNE ) و مود منوال ( MANUAL ) شباهت ها و تفاوت های این دو حالت با یکدیگر می پردازیم.
مود FBWA در هواپیما های مدل ( FLY BY WIRE_A )
حالت FBWA محبوب ترین حالت برای پرواز کمکی در هواپیما های مدل و بهترین حالت برای پروازهای خلبان های کم تجربه است. در این حالت هواپیما میزان چرخش حول محور های رول و پیچ توسط استیک ها را، در یک مقدار مشخص نگه می دارد.
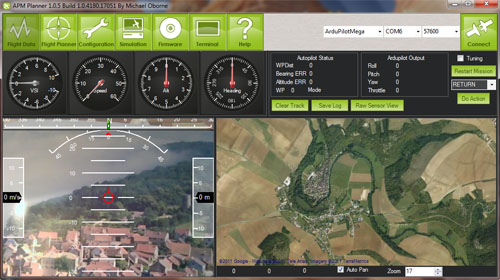
بنابراین اگر شما استیک aileron را به سرعت به یک سمت بگیرید، هواپیما ی شما حول محور پیچ شروع به چرخش می کند تا زمانی که به مقدار قرار داده شده برای LIM_ROLL_CD در Mission Planner برسد (بر حسب درجه ) امکان ندارد که شما بتوانید هواپیما ی مدل خود را بیشتر از محدوده ی رول مشخص شده در LIM_ROLL_CD بیشتر بچرخوانید. همچنین امکان چرخش حول محور پیچ خارج از محدوده ی تنظیم شده ی LIM_PITCH_MAX و LIM_PITCH_MIN را ندارید.
توجه داشته باشید که ثابت نگه داشتن هواپیما در محور پیچ به معنای ثبات ارتفاع نیست. این که یک هواپیما به هنگام پرواز ارتفاع می گیرد یا ارتفاع کم می کند بدون تغییر زاویه در محور پیچ وابسته به سرعت باد است، که در درجه ی اول توسط throttle کنترل می شود. بنابراین برای به دست آوردن ارتفاع باید استیک throttle را بالا بکشید و برای از دست دادن ارتفاع باید استیک throttle را پایین بیاورید. اگر می خواهید هواپیما دارای کنترل ارتفاع باشد، باید به حالت FlyByWireB نگاه کنید.
در حالت FBWA میزان throttle کنترل می شود ، اما با تنظیمات THR_MIN و THR_MAXاین میزان محدود می شود.
در مود FBWA میزان rudder تحت کنترل منوال ( دستی ) به همراه هر آنچه از rudder را که بر روی محور رول میکس کرده اید. بنابراین می توانید از رادر برای افزایش و کاهش استفاده کنید و هنوز هم از آن برای هماهنگی چرخش به طور خودکار استفاده می شود.
مود منوال ( MANUAL )
حالت تنظیم مداوم رادیو کنترل بدون هیچ گونه پایدار کننده ی پرواز به این معنی که تمام ورودی های رادیو کنترل به صورت مستقم به خروجی ها متصل می شود. تنها راه هایی که باعث می شود ورودی و خروجی رادیو کنترل با هم متفاوت باشد به شکل زیر اند:
- اگر یک فیلسیف ( failsafe ) تنظیم کرده باشید که کنترل پرواز را در دست بگیرد.
- اگر
VTAIL_OUTPUTرافعال کرده باشید و میکسر نرم افزار VTAIL را روی خروجی اعمال کرده باشید. - اگر گزینه ELEVON_OUTPUT فعال کرده باشید، سپس یک میکسر نرم افزاری Elevon روی خروجی اعمال کرده باشید.
حالت تنظیم خودکار PID ( مود AUTOTUNE )
مود AUTOTUNE به همان روش FBWA ( مود FLY BY WIRE_A ) پرواز می کند، با این تفاوت که در این حالت ضرایب PID به صورت خودکار تنظیم می شود.
برای توضیحات بیشتر راجع به مود AUTOTUNE بخوانید.