همان طور که در بخش قبلی نحوه ی بارگذاری فریمور آردوپایلوت را توسط نرم افزار Mission Planner روی فلایت کنترل پیکس هاوک را آموزش دادیم ، در این بخش چگونگی کالیبره کردن سنسور های فلایت کنترل پیکس هاوک را در ادامه قرار داده ایم .
پس با ما همراه باشید …
آموزش ساخت کوادکوپتر با استفاده از فلایت کنترل پیکس هاوک
قبل از هر چیز باید ملخ ها را از روی موتور ها باز کنید و باتری را به کواد کوپتر خود وصل کنید .
آموزش کالیبره کردن سنسور های فلایت کنترل پیکس هاوک
برای کالیبره کردن سنسور های فلایت کنترل پیکس هاوک خود ، ابتدا باید فلایت کنترل را به کامپیوتر متصل کنید .
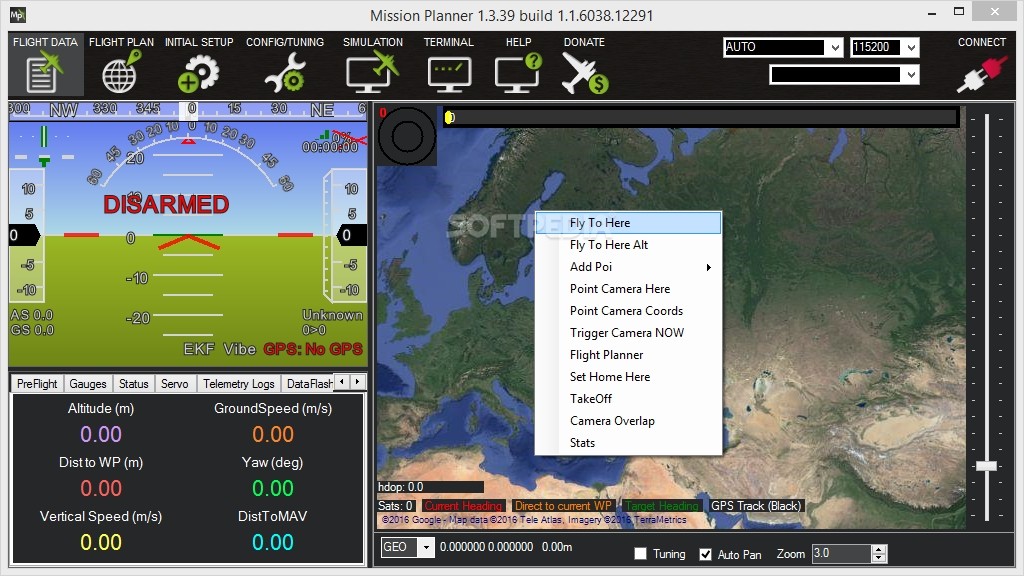
در ادامه نرم افزار Mission Planner را باز کرده و به فلایت کنترلر خود متصل شوید .
به صفحه ی Initial Setup رفته و Mandatory Hardware را انتخاب کنید .
در این گزینه امکان کالیبره کردن شتاب سنج ( Accel ) و قطب نما ( Compass ) و . . . را در مقابل شما قرار می دهد .
هشدار
اگه کواد کوپتر شما یا به طور کلی تر پهپاد شما در زمان کالیبره شدن دچار خطا شود و شما آن خطا را نادیده بگیرید و دستگاه خود را به پرواز در بیاورید ، پرنده ی شما در هنگام پرواز توسط مود هایی که از داده های آن سنسور پیروی می کند دچار مشکل می شود .
کالیبره کردن شتاب سنج (Accel Calibration )
برای کالیبره کردن شتاب سنج به صورت عکس پایین عمل کنید .

روی گزینه ی Calibrate Accel کلیک کنید و کوادکوپتر خود را مطابق حالت هایی که در Mission Planner به شما می گوید قرار دهید .
این حالت ها به ترتیب روبرو است : هم سطح ، به سمت چپ ، به سمت راست ، جلو پرنده رو به بالا ، جلو پرنده رو به پایین و کواد کوپتر به پشت است ( مانند تصویر زیر ).

توجه
تا زمانی که خود نرم افزار به شما نگفته است جهت آن را تغییر ندهید تا در کالیبره ی شدن آن دچار مشکل نشوید .
پس از انجام هر مرحله گزینه ی Click When Done را انتخاب کنید تا وارد مرحله ی بعدی شوید و کوادکوپتر خود را در موقعیت گفته شده قرار دهید .
کالیبره کردن Compass ( قطب نمای روی فلایت کنترل )
برای کالیبره کردن قطب نما به صورت زیر عمل می کنیم .
- ابتدا در صفحه ی Compass نوع فلایت کنترل خود را Pixhawk/PX4 انتخاب می کنیم .
پیغامی روی صفحه نمایش داده می شود که گزینه ی Yes را انتخاب می کنیم . - primary compass را روی Compass2 قرار می دهیم .
- تیک های مربوط به Compass#1 را بردارید .
- در Compass#2 تیک Use this compass را گذاشته و تیک Externally mounted را بردارید .
- روی گزینه ی Start کلیک کنید .
همانند شکل زیر:

حالا شما باید که کوادکوپتر خود را در جهت های مختلف جغرافیایی مانند فیلم زیر بچرخانید تا فرایند کالیبره کردن قطب نما کامل شود .
کالیبره کردن رادیو کنترل
برای این کار کافی است که شما وارد بخش Radio Calibration شوید و گزینه ی Calibrate Radio را انتخاب کنید .
حال کافی است که تمام سوئیچ ها را باز و بسته کنید و استیک ها را بالا و پایین کنید .
به همین راحتی رادیو کنترل شما کالیبره شد .
کالیبره کردن اسپید کنترلر ها
برای کالیبره کردن اسپید کنترل ها یک راه ساده تر از روش اردوپایلوت را به شما معرفی می کنیم .
برای این کار به صورت زیر عمل می کنیم :
- باتری را از کوادکوپتر خود جدا کنید .
- رادیو کنترل را روشن کنید و تراتل را در حد اکثر مقدار خود قرار دهید .
- سپس باتری را به اسپید کنترلر ها متصل کنید و منتظر بمانید تا آهنگ موتور ها قطع شود .
- پس از پایان یافتن صدای موتور ها تراتل را در کمترین مقدار خود قرار داده و منتظر بمانید تا آهنگ موتور ها قطع شود .
خب اسپید کنترلر های شما توسط رادیو کنترل کالیبره شد .
خب تا اینجای کار اسپید کنترلر ها و رادیو کنترل و سنسور های شتاب سنج و قطب نما شما کالیبره شد ، حالا شما می توانید به راحتی کوادکوپتر خود را به پرواز در آورید ( البته به صورت دستی و روی مود منوال – manual mode ) پس برای تنظیمات بیشتر این سیستم ها منتظر مقاله ای درباره ی تنظیمات کوادکوپتر با Mission Planner و یا QGC ( کیو جی سی – QGroundControl ) باشید .