در این مقاله به بررسی فلایت کنترل های امینیباس Omnibus F4 Pro ( دارای سنسور جریان روی برد ) و F4 AIO ( بدون سنسور جریان روی برد ) می پردازیم.
مشخصات فلایت کنترل امینیباس Omnibus F4 Pro و F4 AIO
توجه
پشتیبانی از این برد در ورژن های Copter-3.6.0 و Plane-3.9.0 (و بالاتر) نرم افزار آردوپایلوت در دسترس است.
- پردازنده
- STM32F405 ARM
- سنسور ها
- MPU6000 IMU (شتاب سنج ، جایرو )
- سنسور فشارسنج BMP280
- سنسورهای ولتاژ و جریان ( در مدل پرو )
- رابط ها
- UARTS
- 6 یا 8 خروجی PWM ( فقط در Pro )
- ورودی های رادیویی PWM یا PPM و SBUS
- درگاه I2C برای قطب نما اضافی
- پورت USB
- دارای ماژول OSD روی برد این فلایت کنترل
ورژن ها
برای فلایت کنترلر های امینیباس ورژن ها و مدل های مختلفی وجود دارد. در بین ای مدل های مختلف، مدل هایی بهترین نتایج و عملکرد را ارائه می کنند که از پد لحیم کاری جامپر برای انتخاب ورودی SBUS یا PPM مورد استفاده در رسیور قرار داده شده است. این پد جامپر باید برای همه ی رسیور های رادیویی روی PPM لحیم شود.
اردوپایلوت بطور خودکار هر ورودی پشتیبانی شده ( SBUS یا PPM یا DSM ویا … ) را بر روی ورودی رسیور با این انتخاب جامپر تشخیص داده و می پذیرد. علاوه بر این ، مطمئن شوید که این برد دارای فشارسنج ، ورودی کارت حافظه و سنسور کنترل جریان است.
اتصالات فلایت کنترلر
ماژول GPS به UART6 متصل می شود.
ارتباط تلمتری در UART 1 در دسترس است.
پین های مشترک UART3 و I2C فقط برای استفاده از I2C امکان پذیر است تا بتوانید قطب نمای خارجی یا سنسور سنجش سرعت هوای دیجیتال را به فلایت کنترل اضافه کنید.
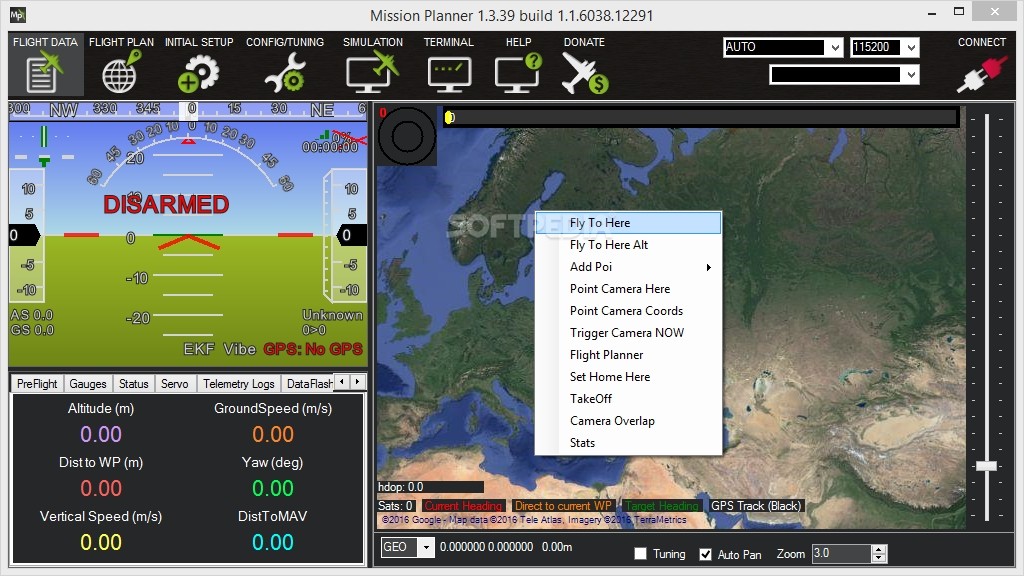
از پین RSSI روی برد می توان به عنوان ورودی RSSI آنالوگ استفاده کرد. از پین 0 به عنوان پین ورودی RSSI در Mission Planner استفاده کنید.
اگر شما قصد دارید که از طریق اسپید کنترلر ها به فلایت کنترل خود برق برسانید، باید دیود مشخص شده در تصویر زیر را از روی برد باز کنید.

دیگر اتصالات روی این فلایت کنترلر به شرح زیر است:

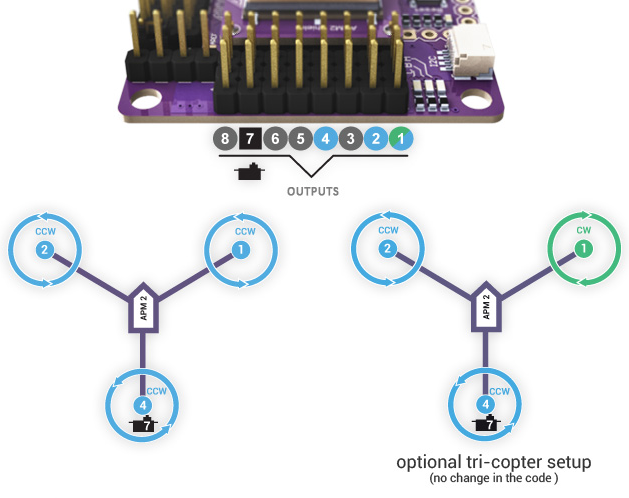
خروجی PWM
نسخه Pro دارای 6 خروجی PWM است ( پد های سوراخ شده روی برد ) PWM7 و PWM8 در پشت برد که با نوشته ی MOTO مشخص شده است. نسخه AIO تنها 6 خروجی PWM ارائه می دهد.

قابلیت DSHOT
تمام خروجی موتور ها و سروو ها دارای قابلیت Dshot و PWM هستند. با این حال ، مخلوط کردن Dshot و عملکرد PWM معمولی برای خروجی ها، به گروه ها محدود می شود ، یعنی. فعال کردن Dshot برای یک خروجی در یک گروه ، نیاز دارد که کلیه خروجی های آن گروه به جای خروجی PWM ، به عنوان Dshot تنظیم و استفاده شوند. گروه های خروجی که باید یکسان باشند (PWM یا Dshot ، در صورت تنظیم به عنوان یک خروجی سروو یا موتور معمولی) عبارتند از: 1/2/6 ، 3/4/5 ، 7/8 ( فقط در مدل Pro ).
فلش کردن فریمور
معمولاً این فلات کنترلر ها با فریمور های betaflight یا INav به فروش می رسند و در صورت تمایل به استفاده از اردوپایلوت نیاز به بروزرسانی هر دو فریمور و بوتلودر دارید ، زیرا یک بوتلودر سازگار با آردوپایلوت برای استفاده های بعدی فریمور آردپیلوت مورد نیاز است.
فایل های فریمور را می توانید در اینجا پیدا کنید. از فریمور omnibusf4pro برای بردهای OmnibusF4Pro و برای نسخه های AIO از فریمور omnibusf4 استفاده کنید.
حالت DFU فلایت کنترل امینیباس
برای انجام این کار ، باید جامپر DFU را روی برد را فلایت کنترلر خود فشار دهید. در اکثر برد ها ی فلایت کنترلر امینیباس، پس از اتصال برد با کابل USB به کامپیوتر این دکمه را فشار می دهیم.

dfu-util را نصب کنید
در سیستم عامل لینوکس (اوبونتو)
sudo apt-get install dfu-usedسیستم عامل X
brew install dfu-utilدر سیستم عامل ویندوز
- dfu-util دانلود کنید و در یک درایو قرار دهید ( به عنوان مثال درایو D ).
- نام آن را به dfu-util.exe تغییر دهید.
- مسیر dfu-util.exe را به بخش Patch های سیستم انتقال دهید:
My Computer > Properties > Advanced > Environment Variables > Path - به جای استفاده از dfu-util ، می توانید بوتلودر را با بتافلایت فلش کنید. کافی است مانند دستور العمل قرار داده شده عمل کنید. اگر فلایت کنترلر شما به عنوان یک پورت Com در ویندور شناخته نشده است، باید zadig را بارگیری و نصب کنید.
فلش کردن بوتلودر
باینری های بوت لودر برای اهداف فعلی را می توان در اینجا یافت کنید.
برای این نوع صفحه، omnibusf4pro_bl.bin را دانلود کنید. با اتصال فلایت کنترلر خود به کامپیوتر از طریق USB و وارد شدن به حالت DFU ، یک ترمینال را باز کنید و با دستور زیر بوتلودر جدید را فلش کنید:
sudo dfu-util -d 0483:df11 -c 1 -i 0 -a 0 -D omnibusf4pro_bl.bin -s 0x08000000پس از پایان فلش کردن، برد را بچرخانید و باید یک LED که به سرعت چشمک می زند را ببینید.
فلش کردن فریمور اردوپایلوت
Mission Planner را باز کنید و به صفحه ی Initial Setup بروید. پورت COM در سمت راست بالا که در Device Manager است را تایید کنید.

Load Custom Firmware را انتخاب کرده و به پرونده apj. مربوطه بروید . پس از اتمام فلش کردن ، دوباره دستگاه را روشن کنید .

اکنون ArduPilot را روی omnibusF4 خود اجرا می کنید . شما می توانید از همین فرآیند برای ارتقا به نسخه های جدید تر ArduPilot استفاده کنید . در هر صورت از قابلیت بروز رسانی فریمور MP استفاده کنید یا فریمور دستگاه دلخواه خود را از منبع تهیه کرده و پرونده apj. را روی صفحه بارگذاری کنید .
تنظیمات فلایت کنترل Omnibus
نحوه ی اضافه کردن مانیتور باتری :
BATT_MONITOR = 4
دوباره بوت کنید.
BATT_VOLT_PIN 12
BATT_CURR_PIN 11
BATT_VOLT_MULT 11.0
BATT_AMP_PERVLT 38.0 ( توجه داشته باشید ، این مقدار بسته به نوع تولید کننده صفحه خاص ، ممکن است از 18 تا 38 متغیر باشد و برای مطابقت با جریان واقعی باید کالیبره شود )